基于单片机的灭火机器人设计
2 系统硬件设计
2.1 单片机
单片机是一种微处理器,同时它也是一个系统的核心,有超大规模的集成电路技术,主要将中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能集成到一起构成一个完整的计算机系统[7]。
本项目选用的STC89C52RC单片机,该单片机价格低廉,易于操作,使用较为广泛,同时,它是STC89C51的增强型,综合考虑本设计的实际需求,选择STC89C52RC作为主控芯片。
STC89C52RC是双列直插式40管脚的芯片,其外部有32个端口可供用户使用,其引脚如图2.1所示。
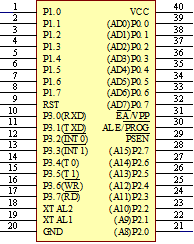
图2.1 STC89C52RC引脚图
3 系统软件设计
3.1 系统软件开发环境
本项目软件方面设计主要是使用Keil μVision4实现的,其系统是由C语言来进行编程的,最后生成.hex文件。项目下载到单片机前编译要显示成功,才可以进行软件和单片机串口连接将所编写的程序下载到单片机里。Keil C51软件可提供丰富的库函数和功能强大的集成开发调试工具。使用C语言编程时,Keil是最实用的软件[14],程序编译界面如图3.1所示。
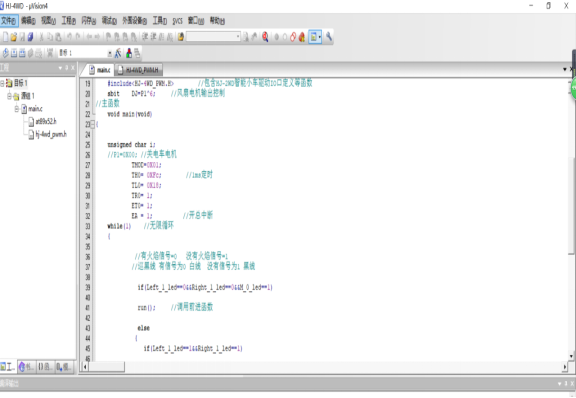
图3.1 Keil的程序编译界面
3.2 系统总程序设计
主程序为一个系统的设计主干,它可决定灭火机器人的主要工作内容。每个功能的实现还需要调用具体的子程序来运行[15]。智能灭火机器人主要工作过程为:电源给电系统初始化,灭火机器人开始根据黑色轨迹线路进行行走,火焰传感器感应到火焰的位置,一定距离开始后,风扇开始旋转,直到将火焰扑灭,火焰扑灭后,风扇将持续一段时间转动后再停止,然后小车再开始继续前进寻找下一处火焰。系统主程序流程图如图3.2所示。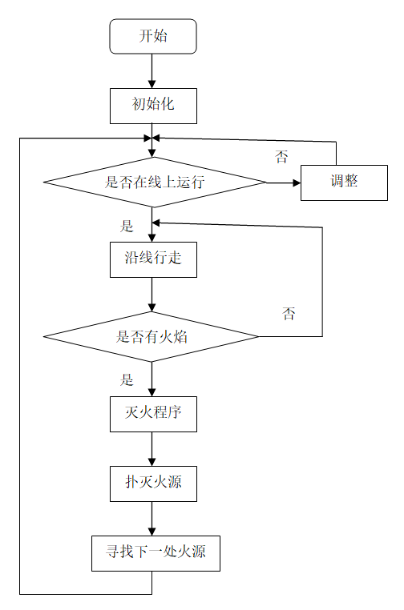
图3.2 系统主程序流程图
4 项目调试
4.1 硬件调试
硬件调试前我们需要焊接电路板,按照硬件高矮进行统一焊接,焊接时尽量使用焊锡进行连线,为了避免焊接错误,要对每一条焊接线路进行检查,最后进行接线处理,注意正负极接线。硬件调试主要分为五部分,分别为电路的检查、通电观察、静态调试、动态调试和指标测试[18]。
在动手操作过程中有很多问题一直阻碍小车正常的灭火运行,主要遇到的问题是:
1.传感器不工作,或者时好时坏,主要是传感器正负极连线问题,接反则不会转动,还有连接线是否接触正常,还有传感器内部是否发生短路、断路等问题,导致不导通;
2.单片机下载程序时,一定要进行冷启动,否则程序下载不成功,冷启动后,如果软件一直显示正在检测单片机,主要原因是没有选择对应的COM口或者电量不充足;
3.传感器灵敏度的调节,主要调节传感器电位器,或者调节电阻,反复实验根据LED灯的亮度来找到传感器最合适的状态,便于小车更好的运行。
4.2 软件调试
本项目使用的单片机型号为STC89C52RC系列,这个系列的单片机应用非常广泛,编译语言以C语言为主。Keil μVision4软件如图4.1所示。
图4.1 Keil μVision4
4.3 实物调试
本项目主要通过硬件与软件的结合,实现小车循迹灭火。首先我们要测试小车循迹行走,在无火焰时,小车可一直按照所设定轨迹行走,如图4.3所示。其次还要测试灭火小车的主要功能——灭火,在火焰出现时小车停下,风扇转动,扑灭火源,如图4.4所示。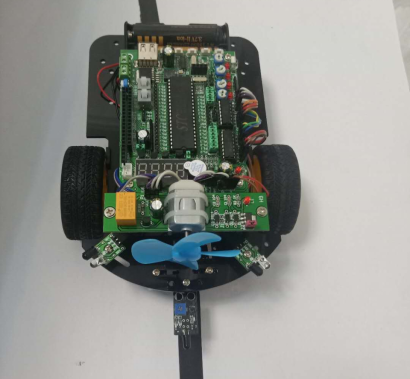
图4.3 循迹运动
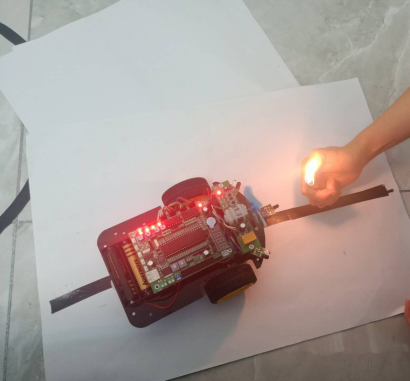
图4.4 风扇灭火
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

