【论文阅读—可解释性AI(Transformer篇)】Transformer Interpretability Beyond Attention Visualization
参考文献:CVPR 2021 Open Access Repository
摘要
Transformer 是一种非常强大的神经网络架构,最初用于处理文字,现在也越来越多地应用在图像分类任务中。我们经常想知道:模型是“看”到图像的哪些部分才做出某个判断的?为此,已有一些方法尝试使用 Transformer 的注意力图(attention maps)或基于一些规则来“追踪”模型的决策过程,参考之前博客Transformer中绘制注意力图-Attention Rollout & Attention Flow-CSDN博客。
这篇文章提出了一种全新的方法,用来解释 Transformer 是如何做出判断的:
-
首先,它会根据一个叫做「Deep Taylor 分解」的数学原理,给每个图像区域分配一个“重要性”分数(也叫“相关性”)。
-
然后,它将这些分数从模型的输出一步步反向传播回输入,这个过程要经过注意力层和一些跳跃连接(skip connections),而这些地方是现有方法处理起来很困难的。
-
他们提出了一种新的计算方式,在这个传播过程中能够保持整体的重要性不变,也就是不会在传播中“丢失”解释力。
最后,作者在最新的视觉 Transformer 网络(用于图像任务)和文字分类任务上做了实验,证明他们的方法比以前的方法更清晰、更准确地解释了模型是如何做出决策的。
Introduction
Transformer是“黑箱”的,不像CNN通过卷积核提取图像特征,我们很难知道它是根据图像(或文本)的哪些部分做出判断的,如果能把模型的“思考过程”可视化,就能够为黑箱模型提供可解释性,帮助我们调试模型、检查模型是否公平没有偏见、为其他任务提供参考。
下面是Transformer的核心Self Attention(自注意力)计算机制,他会计算输入中每两个“元素”(比如词、图像小块)之间的“关注程度”,参考大模型交叉研讨课笔记-Transformer架构-CSDN博客
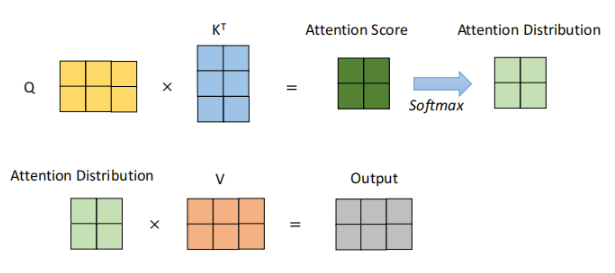
很多可视化方法就是直接用这些 attention 分数来代表模型关注了哪些部分。有的用一层,有的把多层的结果平均。但这也有问题:
-
平均 attention 会让结果变得模糊(信息混杂在一起)
-
每一层的作用不同,简单平均忽略了这一点
有一种叫 rollout 的方法,尝试把多层 attention 整合成一个整体的关注图,效果比单层好一些。但它有个问题:有些“无关”的区域也会被高亮显示出来,因为它基于一些过于简单的假设,具体的局限性在这篇博客里面有提到Transformer中绘制注意力图-Attention Rollout & Attention Flow-CSDN博客。
本文的方法借鉴了一种叫做“相关性传播”的思想,做了以下创新:
-
新规则:提出了一种新的方法来传播“重要性分数”,可以处理模型中的正数和负数(因为 Transformer 中不是所有激活值都是正的)。
-
稳定传播:专门处理了跳跃连接(skip connection)和矩阵乘法这类非参数层的传播问题,防止数值不稳定。
-
融合信息:把 attention 信息和我们计算的 relevancy 分数结合在一起,得到更准确的可视化结果。
-
支持多类解释:我们的方法可以解释某一个特定类别的预测,而不是一幅图就只能有一种“热力图”。
Related Work
计算机视觉中的可解释性方法(CNN为主)
在卷积神经网络(CNN)中,有很多方法可以生成“热力图”,告诉我们模型是根据图像的哪些区域做出判断的。主要有两大类方法:
梯度类方法
这些方法基于 反向传播时的梯度信息,代表模型对输入变化的敏感程度。举几个例子:
-
Gradient × Input:梯度和输入图像逐像素相乘。
-
Integrated Gradients:对输入做插值采样,计算每一步的梯度再平均,更稳定。
-
SmoothGrad:在输入图像中加噪声多次,平均这些噪声图的梯度,减少随机波动。
-
FullGrad:除了考虑输入的梯度,也考虑了偏置项(bias)的梯度。
但问题是这些方法在实际中常常是“类无关的”(class-agnostic),无论你想解释的是哪个类别,图出来的区域几乎一样。
归因传播方法
这些方法基于一个叫 Deep Taylor 分解 的理论,逐层“往回推”模型的决策过程,得到输入中哪些部分贡献最大。
-
LRP(Layer-wise Relevance Propagation):把预测结果一步步往输入传播,要求模型中用的是 ReLU 激活函数。
但Transformer不用ReLU,因此 LRP 要改造才能用在 Transformer 上。还有一些变种方法,比如 RAP、AGF、DeepLIFT、DeepSHAP,其中:CLRP 和 SGLRP 是“类特定的”改进版,会对多个类别进行对比,从而高亮某个类别的关键区域。
其他类型的方法
-
显著性图(Saliency methods):基于人类感知原理找图中显眼区域。
-
激活最大化、Excitation Backprop:用优化或反向传播找模型最关心的区域。
-
扰动方法(Perturbation):对输入图像局部区域进行扰动(比如遮挡),看预测结果怎么变化。这种方法直观、不需要模型细节,但计算量大。
但这些方法在Transformer上不好用,特别是文本中是离散token,不能直接做扰动。
Transformer模型的可解释性
目前专门为Transformer设计的可解释性方法还不多,主流方法大多是:使用attetnion权重本身,很多人直接把Transformer中的attention分数当做“重要性”,但这有很大局限:
-
只用了 attention 这一部分,忽略了 key、query、value 的生成过程;
-
忽略了其他层(比如前馈层、归一化层等);
-
误以为 attention 权重 = 相关性,其实并不是。
之前提出的Rollout方法的问题:
-
假设注意力是线性组合,但实际上 attention 是非线性叠加的;
-
没法区分正向/负向影响,即一个区域是增强了预测还是抑制了预测;
-
简单的平均可能让无关token被误认为很重要(比如背景区域);
-
实验发现它会“错误地高亮”一些和预测无关的区域。
举个代码例子,Transformer中的Attetention Block如下所示:
def forward(self, x, mask=None, attn_mask=None): B, N, C = x.shape qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4) q, k, v = qkv[0], qkv[1], qkv[2] # [B, num_heads, N, D] attn = (q @ k.transpose(-2, -1)) * self.scale # [B, num_heads, D, D] attn = attn.softmax(dim=-1) attn = self.attn_drop(attn) self.attn_map = attn.detach().cpu() # 👈 存储注意力权重,避免梯度干扰 x = attn @ v x = x.transpose(1, 2).reshape(B, N, C) x = self.proj(x) x = self.proj_drop(x) return x所以整个Transformer Attention Block的结构大致是:
Input ↓[ LayerNorm ] ↓[ Self-Attention ] ↓[ Add (残差) ] ↓[ LayerNorm ] ↓[ MLP (Linear → GELU → Linear) ] ↓[ Add (残差) ] ↓OutputMethod
我们想弄清楚 Transformer 模型在做分类时到底在“看”哪里 —— 也就是每一层、每个注意力头对最终分类决策的重要程度。作者提出了一种改进的 可视化方法,它结合了 梯度(gradient) 和 相关性(relevance) 信息,来生成更准确、可解释的注意力图,特别是对某个目标类别(class-specific)。
什么是LRP
推荐一个讲解视频:https://www.youtube.com/watch?v=PDRewtcqmaI,传统的LRP是适用于CNN或MLP模型结构的,如下图传入一张图片经过CNN网络架构之后得到patch,接着前向传播得到每个类别的预测概率。LRP将网络上的输出概率作为输入,patch端的相关性的分数作为输出,构建相关性分数计算网络。
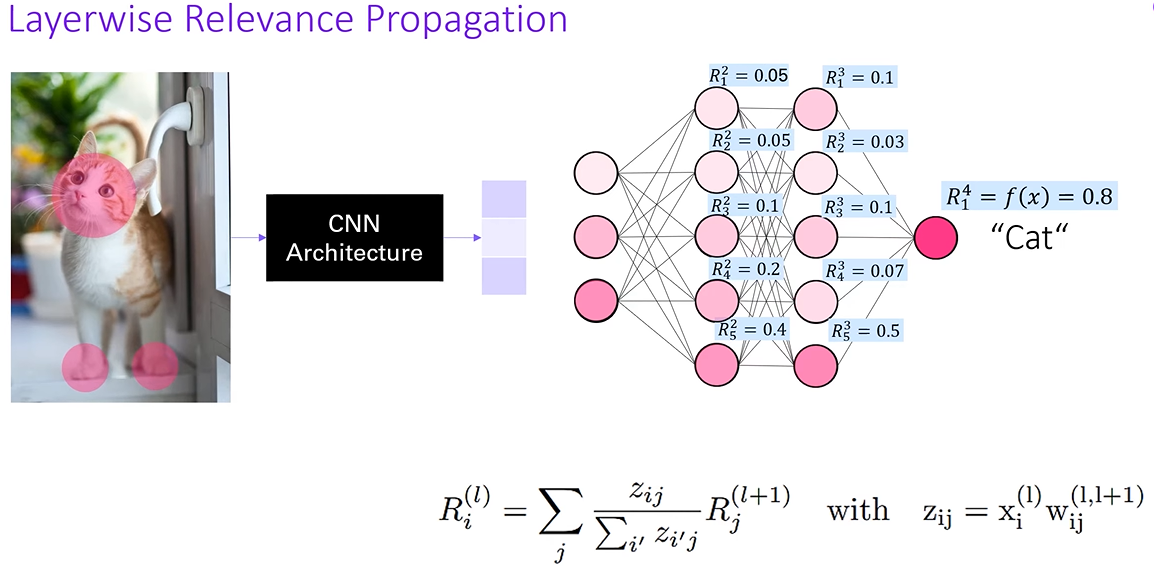
表示第四层(输出层)的第一个节点(猫猫这个类别)的相关性分数(预测概率),接下来我们通过公式计算出下一层各个节点的相关性分数。z表示连接上下层两两节点之间的权重(贡献),
表示的是前一层(l+1)层神经元i对当前层神经元j的贡献(注意,LRP0中不包含bias,也不经过ReLU),
表示所有上一层节点对当前节点的贡献
想象神经元j的预测结果是一个蛋糕(它的相关性是 Rj),我们想把这块蛋糕分配给它的所有“前辈”神经元i。分蛋糕的依据是:谁给它贡献多,就分得多。而这个贡献就是输入值乘以连接权重。
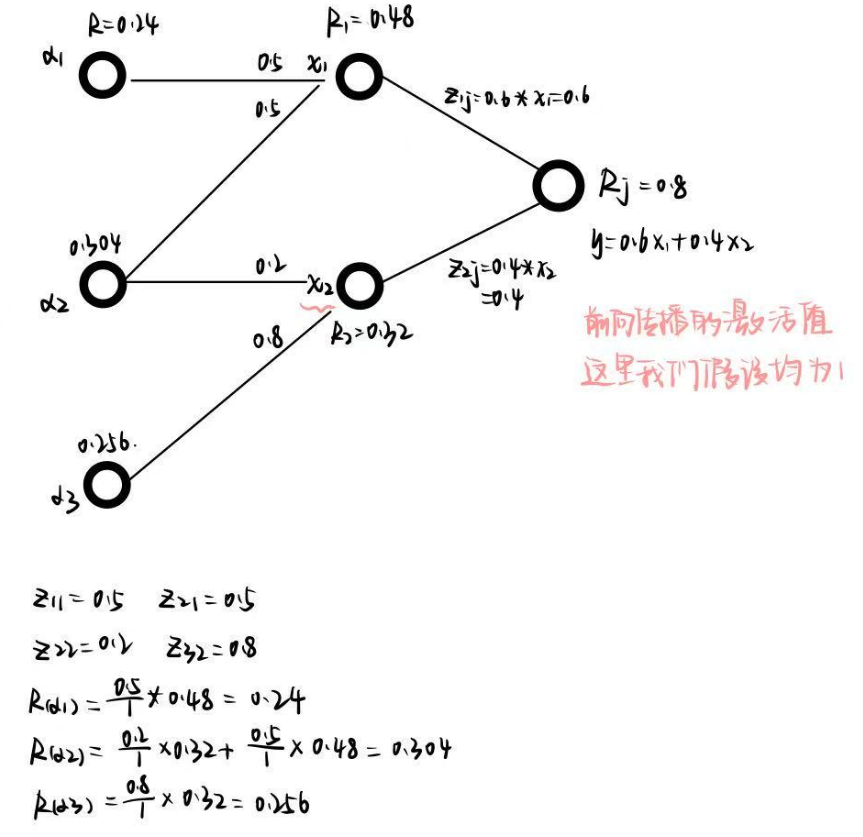
原始的LRP是保持守恒的,也就是说输出端概率为0.8,则之前的每一层相关性分数相加都是0.8。本文中为了能够让LRP适用于Transformer框架做了改进与拓展,以更好地适用于 Transformer 类模型中的自注意力结构(self-attention)。
引入了类特异性梯度和相关性传播的注意力分数计算
不仅考虑输出层预测概率,还引入了对某一目标类别的梯度和相关性分数,把梯度和LRP相关性分数进行融合。

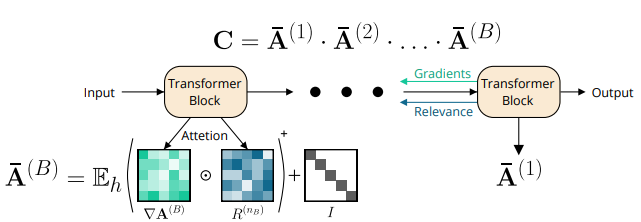
下面是根据官方代码整理出的Transformer框架中是怎么计算相关分数的,不同的层类型对应不同的相关的分数计算公式:
-
Linear:线性层中对某个节点的相关分数划分直接采用梯度,因为线性操作的梯度隐含了输入信息
-
非线性操作(Pool,Add,Clone,Matmul):非线性操作中梯度并不包含输入信息,所以需要乘以输入X作为贡献程度来对相关分数进行划分
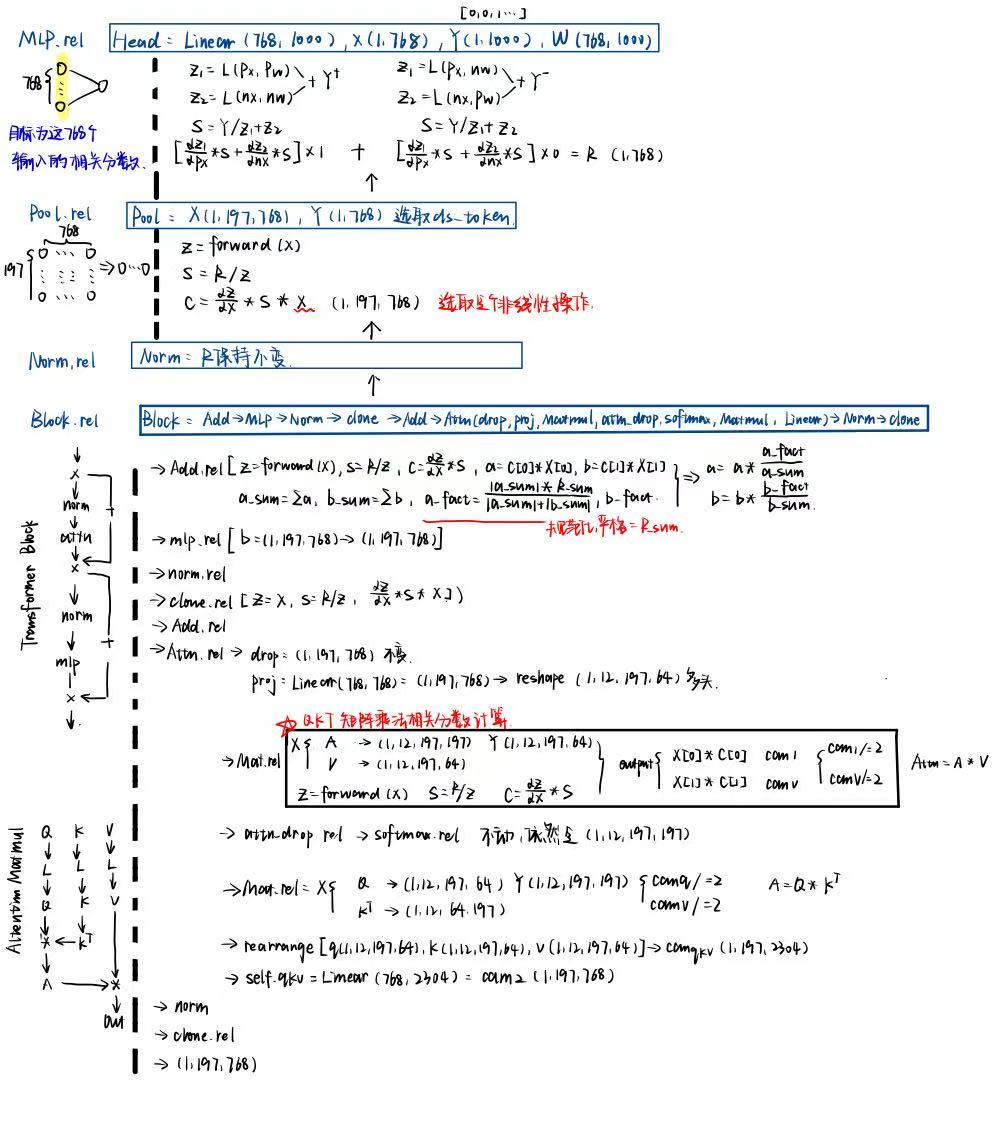
下面是官方的实现代码,full路线就是论文提出的这种梯度+相关分数的方法,里面提到的attention梯度*相关分数的部分就是在图中标红星的部位,矩阵相乘的相关分数计算模块,整体的注意力分数结果如下:
实验结果
对比的解释方法
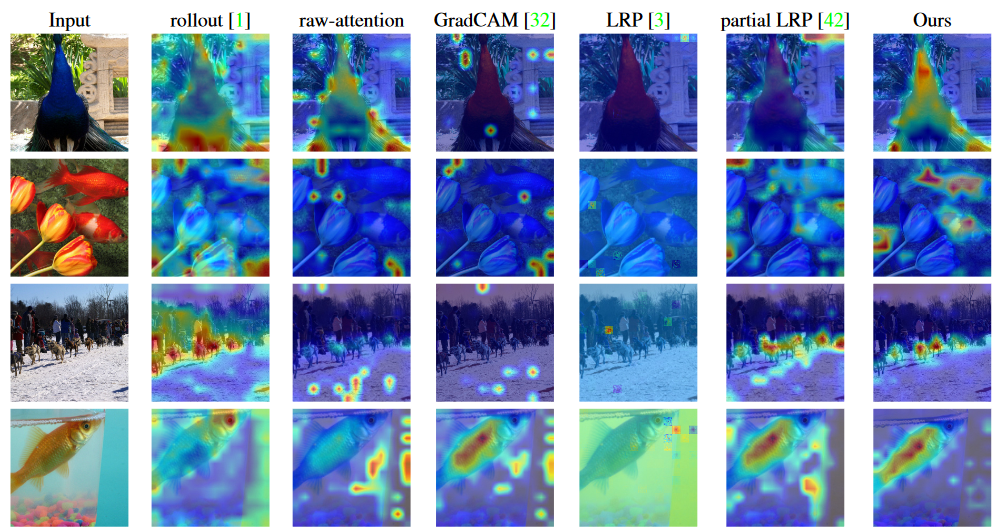
Rollout:将所有层的注意力矩阵乘起来,得到一个整体的注意力“路径”
Raw attention:直接用第一层的注意力矩阵。
GradCAM:计算类别分数对最后一层特征图的梯度,然后加权求和
类似 LRP 或 partial LRP,但这些方法对不同类别输出结果差异不大,说明是“类无关”的。
图像扰动测试
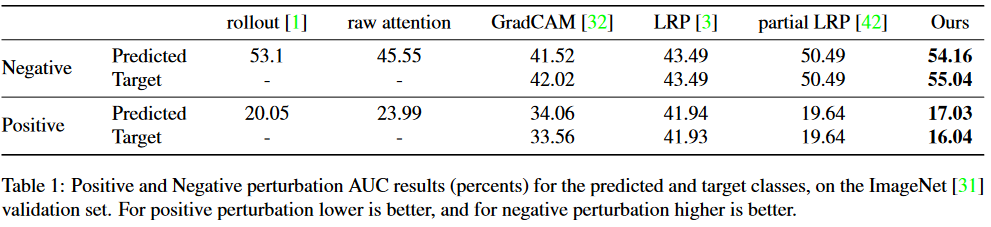
扰动测试(Perturbation Test):用来测试解释图到底有没有指出“关键区域”。
-
Positive:先把重要区域遮住,看模型性能掉多少。
-
Negative:先遮住不重要的区域,看模型性能能否保持住。
-
结果用 AUC(曲线下面积)表示。Positive 越小越好(掉得快),Negative 越大越好(保持好)。
分割测试

把解释图当作“图像分割图”,和真实标注对比。用 pixel accuracy, mIoU, mAP 来测。
文本任务(情感分析)
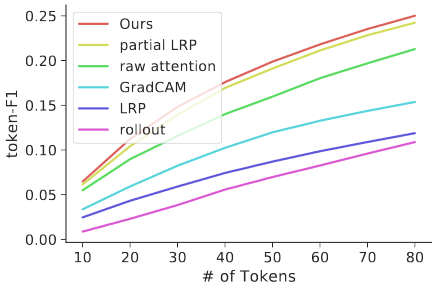
从一段评论中指出哪些词支持判断,用token-F1分数来评估,表示找出“重要词”的准确率和召回率的综合,OURs的方法效果最好,曲线在最上方。
消融实验
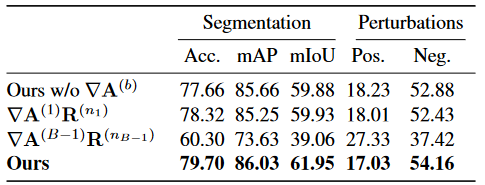
第一行去掉了attention梯度的反向传播
第二行是只使用了第一层的attention梯度和对应的相关性分数
第三行是只使用了倒数第二层的attention梯度和对应的相关性分数。


