安川机器人之间进行EIP通讯_安川机器人通讯配置
目的:安川机器人之间进行信号交互。
作业准备:
①两台开通EtherNetIP功能的安川机器人
②GP7作扫描器(主站);MOTOMINI作适配器(从站)
③网线

1、开机进入管理模式
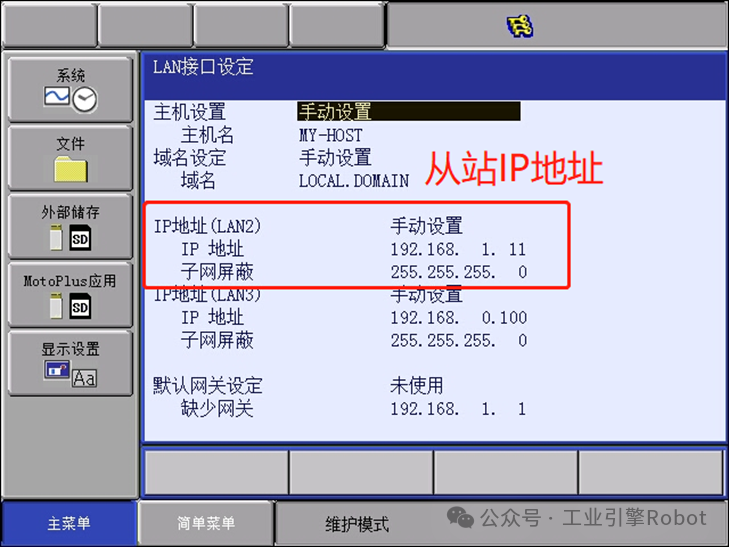
进入维护模式,设置机器人IP地址(优先设置从站IP)
2、管理模式下修改IP地址
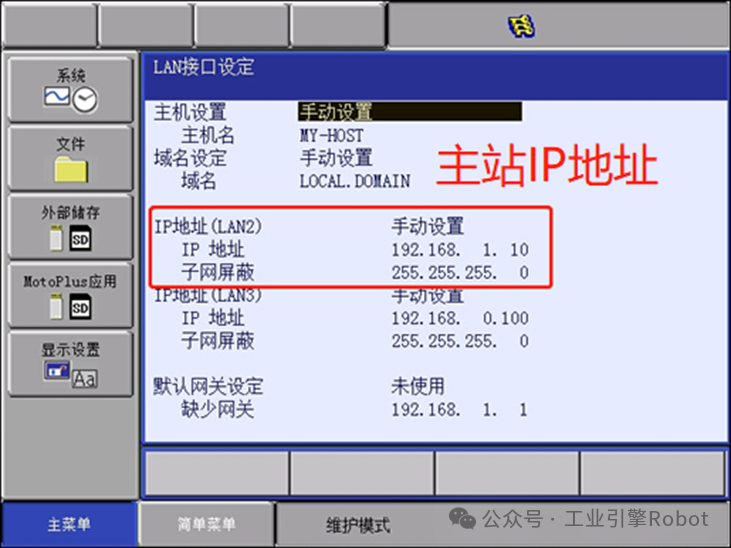
确定两台机器人的IP地址是在同一网段的。确认方法如下(优先设置从站IP地址)
依次点击:系统→设置→选项功能→LAN接口设定→IP 地址
MOTOmini
GP7
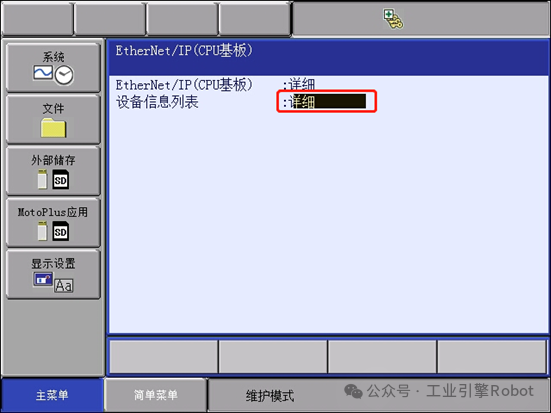
3 、扫描侧(主站)设置
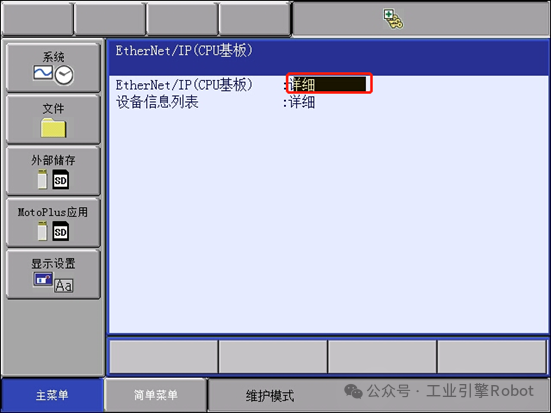
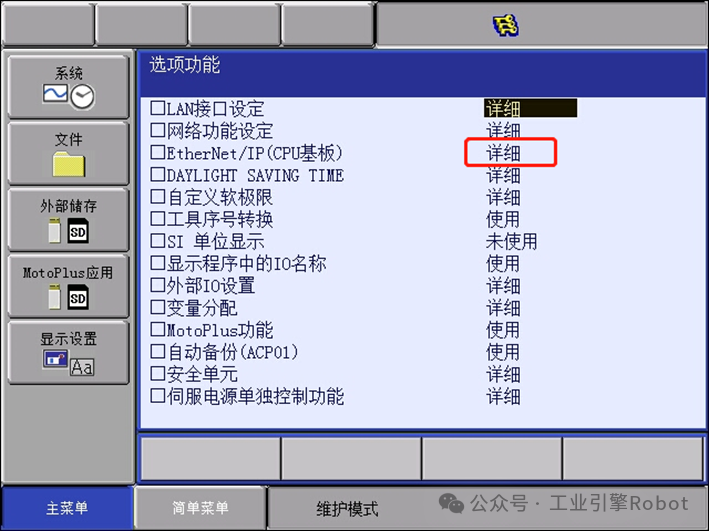
依次点击:系统→设置→选项功能→EtherNet/IP(CPU基板)
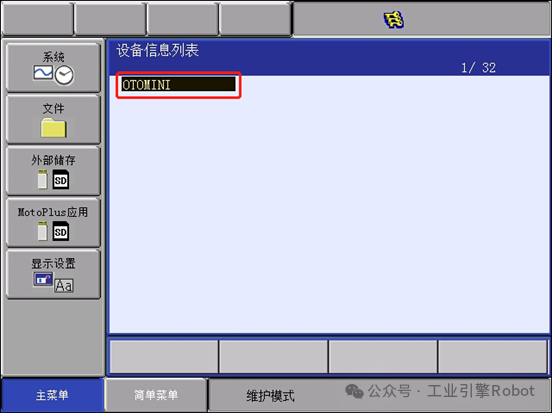
进入【设备信息列表】
修改设备信息
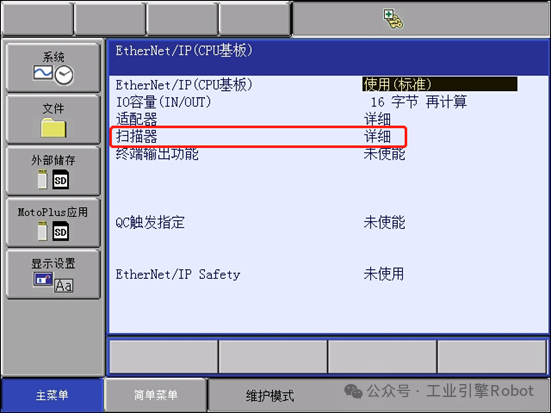
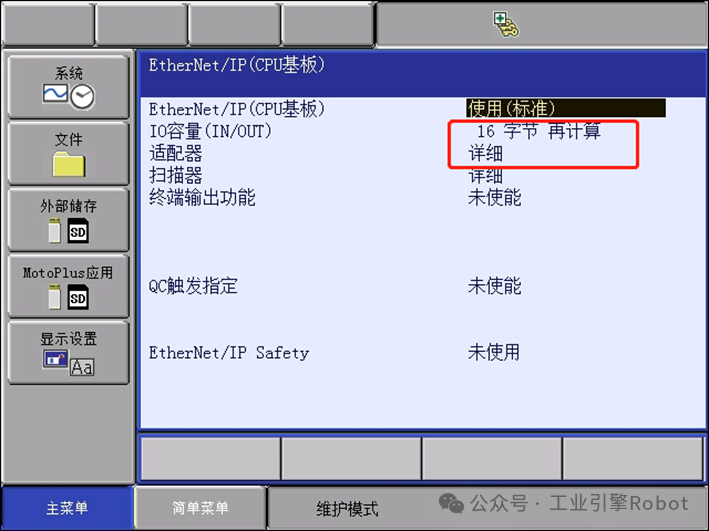
选择【EtherNet/IP(CPU基板)】
设置IO容量为16字节
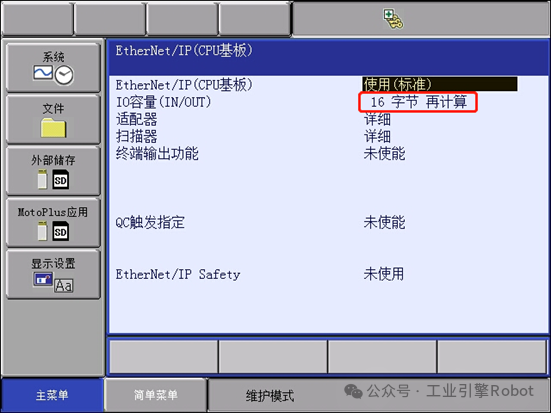
进入【适配器】
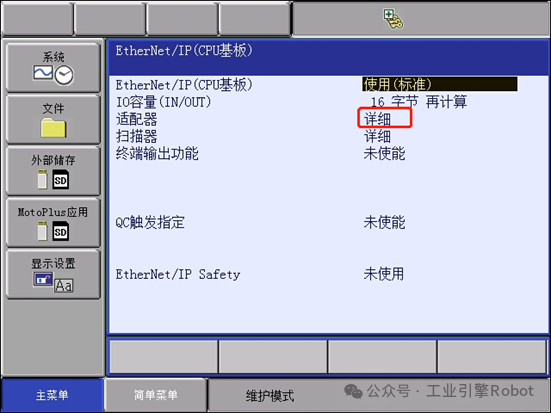
修改适配器未使能
进入【扫描器】
选择设置好的从站名称
填入从站IP地址,按【回车】
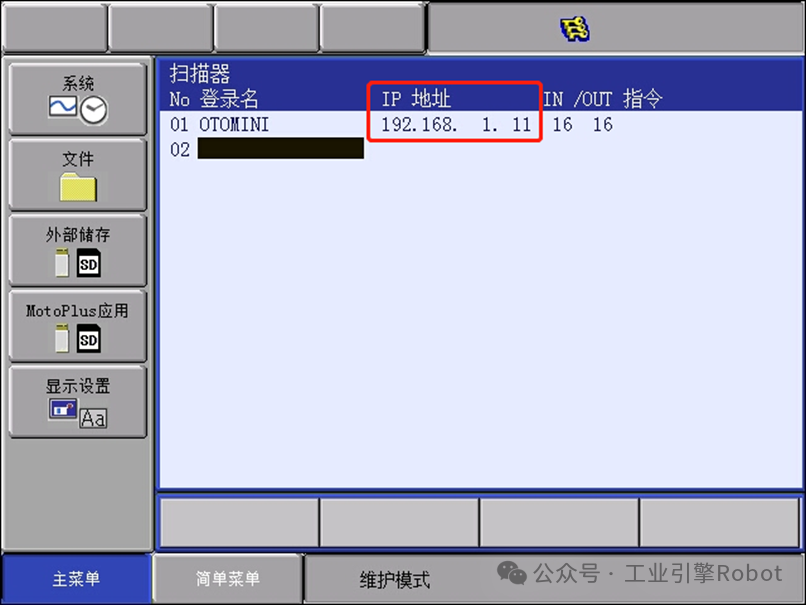
以上配置设置完成后点【回车】→【是】进行一连串的常规IO配置操作。
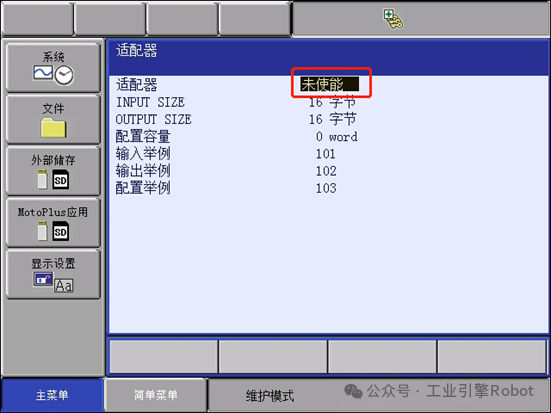
4、 适配器(从站)设置
依次点击:系统→设置→选项功能→EtherNet/IP(CPU基板)
登录【 EtherNet/IP(CPU基板)】
修改IO容量为16
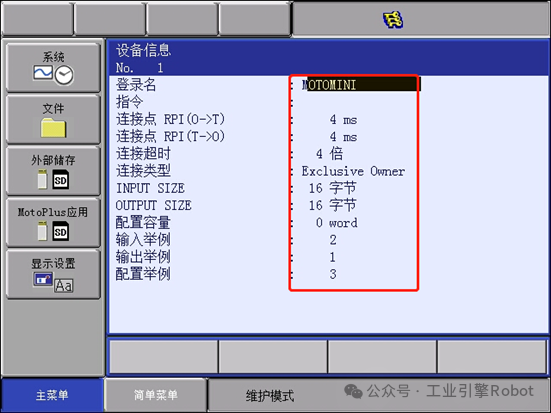
适配器【使能】,16字节,输入举例【1】输出举例【2】配置举例【3】
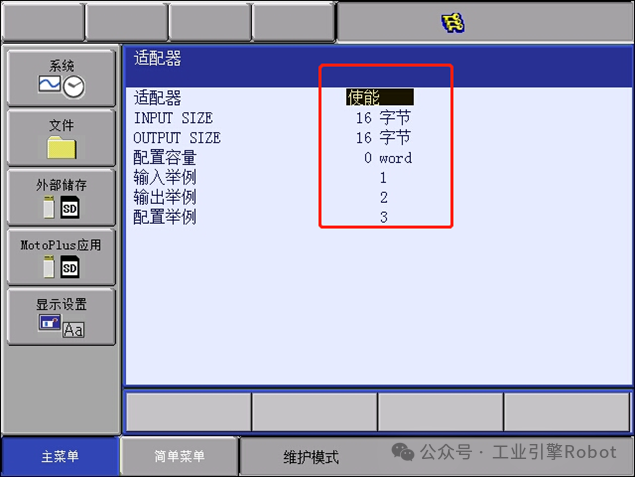
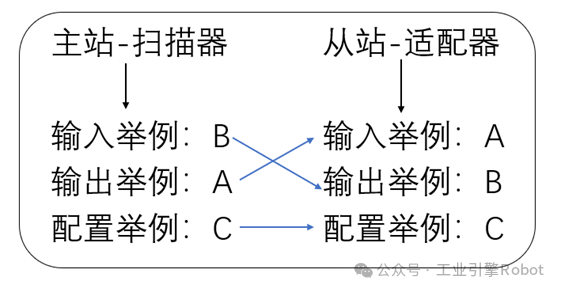
输入举例、输出举例、配置举例 的设置 适配器和扫描器要相互对应。
如图:
以上配置设置完成后点【回车】→【是】进行一连串的常规IO配置操作。
5、重启两台机器人进入在线模式,进行通讯测试
将两台机器人通过网线相连
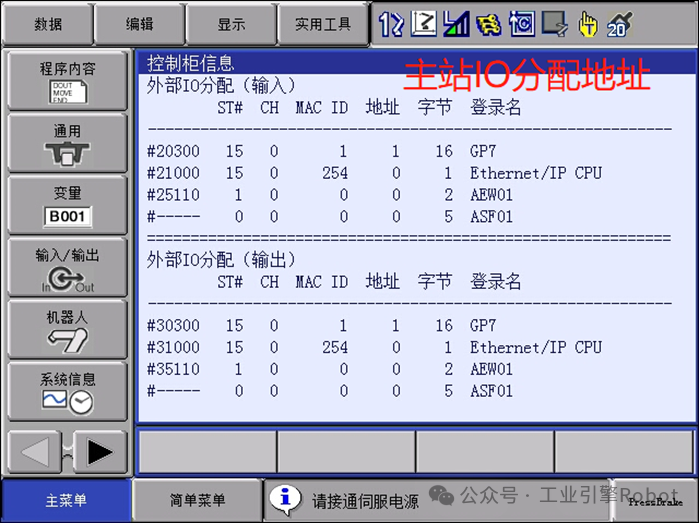
主站扫描器GP7机器人IO地址
从站适配器MOTOMINI机器人IO地址
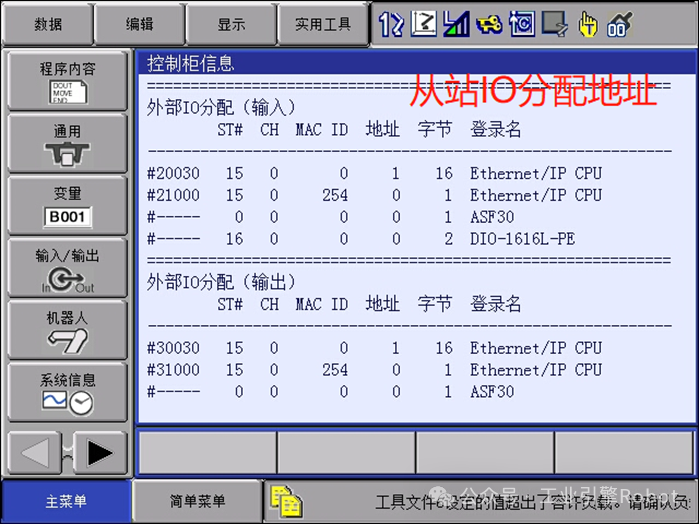
两台机器人的IO配置分配均选择的是自动分配模式,如上图所示。
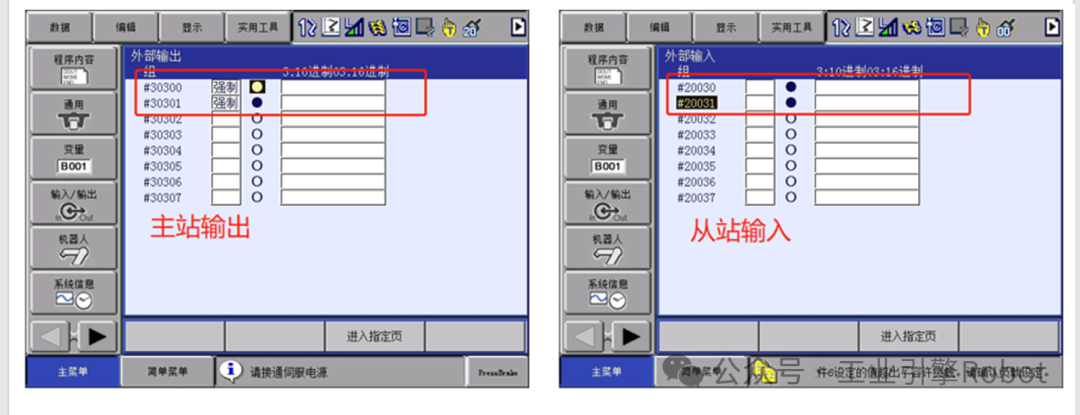
依次点击:主菜单→输入/输出→外部输入/外部输出
主站输出 →从站输入反馈
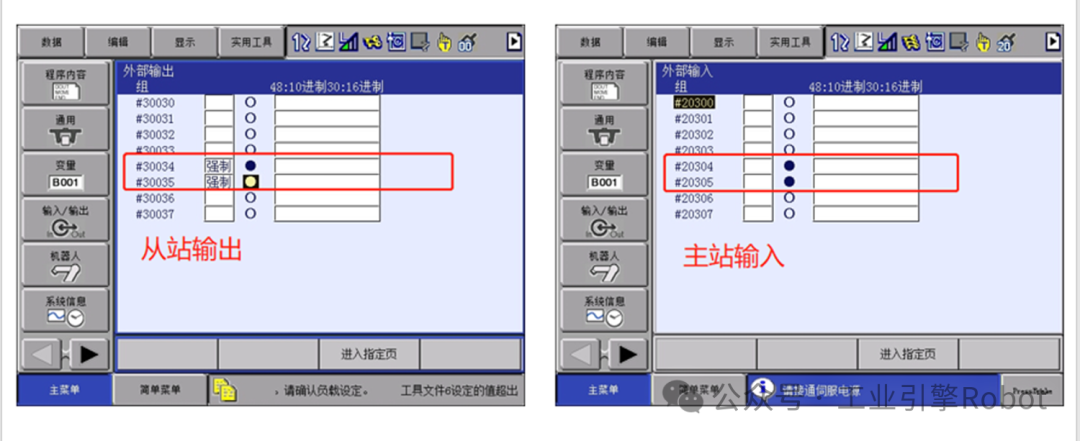
依次点击:主菜单→输入/输出→外部输入/外部输出
从站输出 →主站输入反馈
完成安川机器人之间EIP通信。


