安川机器人TCP标定详细步骤_安川机器人工具坐标系的标定方法
本文介绍了安川机器人TCP标定的详细操作步骤,包括如何进行工具校准以及如何确定工具的方向。
1. 切换安全模式
安川机器人常规安全模式为操作模式,在此模式下,许多机器人设置操作均无法进行。
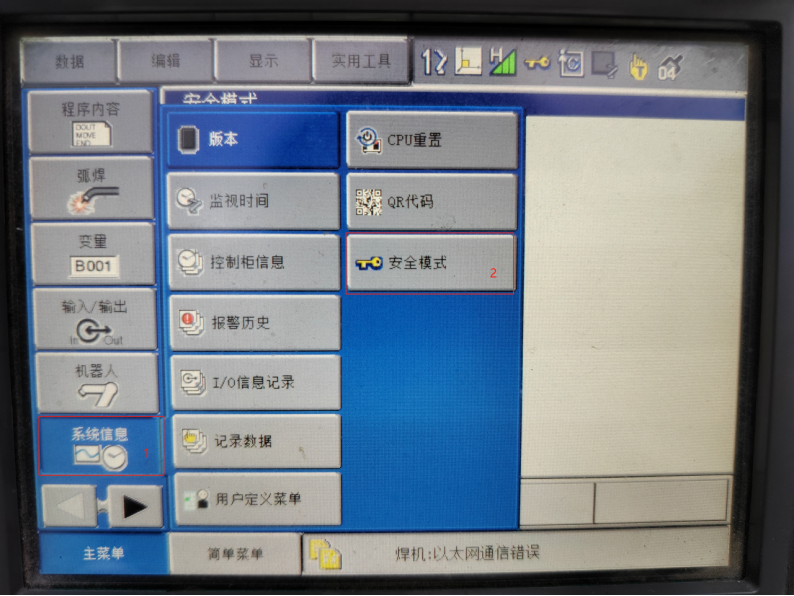
为了进行TCP标定,我们需要将安全模式切换到管理模式。依次点击【主菜单】中的【系统信息】-【安全模式】。
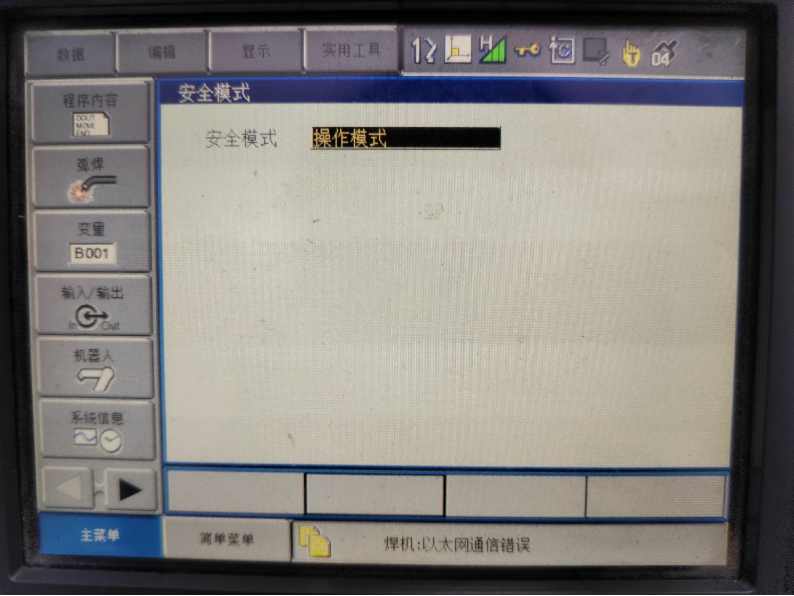
安全模式界面如上图,此时按下【选择】键,将模式切换到管理模式(下图),切换管理模式需要输入密码。
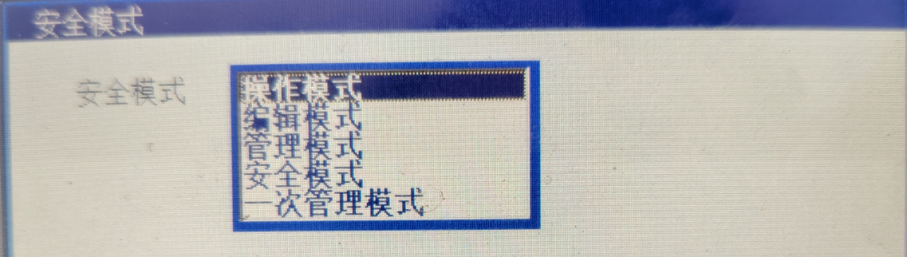
安川机器人出厂初始密码如下:
编辑模式(16个0):“0000000000000000”
管理模式(16个9):“9999999999999999”
安全模式可以通过示教器上方状态栏查看,状态栏有若干个图标,从左开始数第四个图标显示的是当前安全模式,简单来说,该图标中钥匙数量越多,机器人操作权限越高。

2. TCP标定
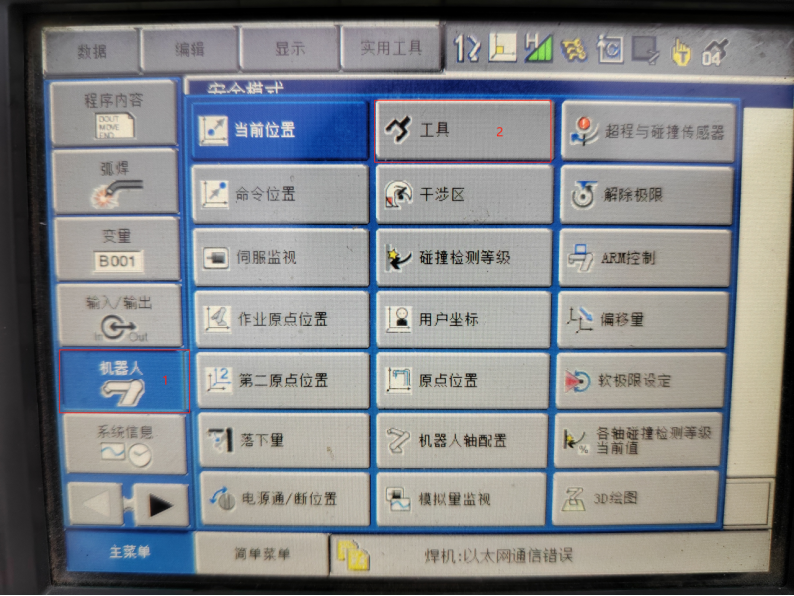
依次点击主菜单中的【机器人】-【工具】,跳转到如下界面;如果没有【工具】选项,先进行第一步切换【管理模式】。
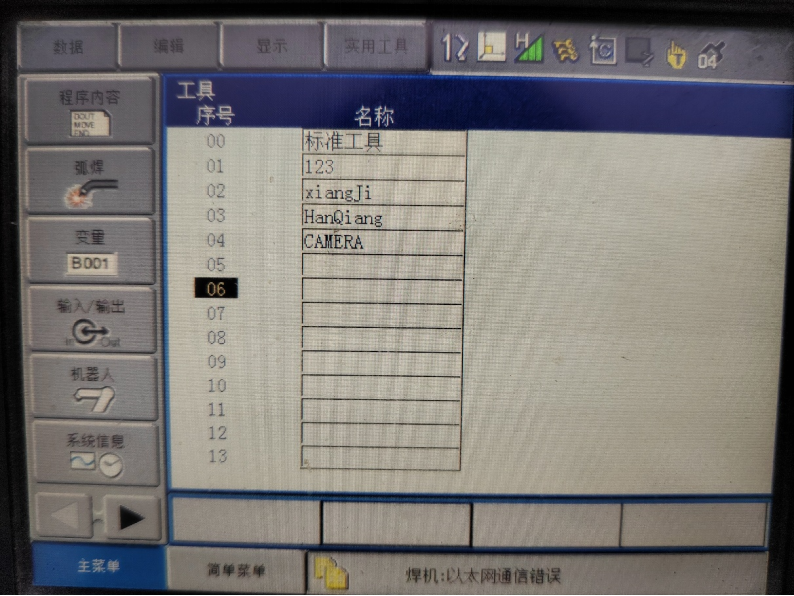
2.1 选择工具号,进入工具校验界面
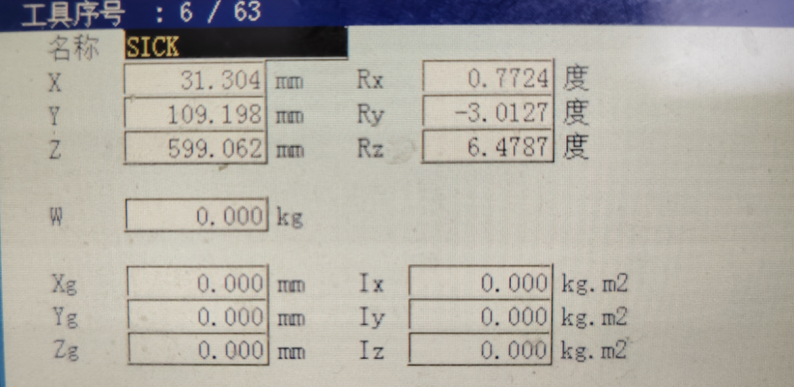
示教器上下移动光标,选择待校准的工具编号(指的是【工具】界面第一列的序号),界面如下,未校准的工具所有数据均为0。
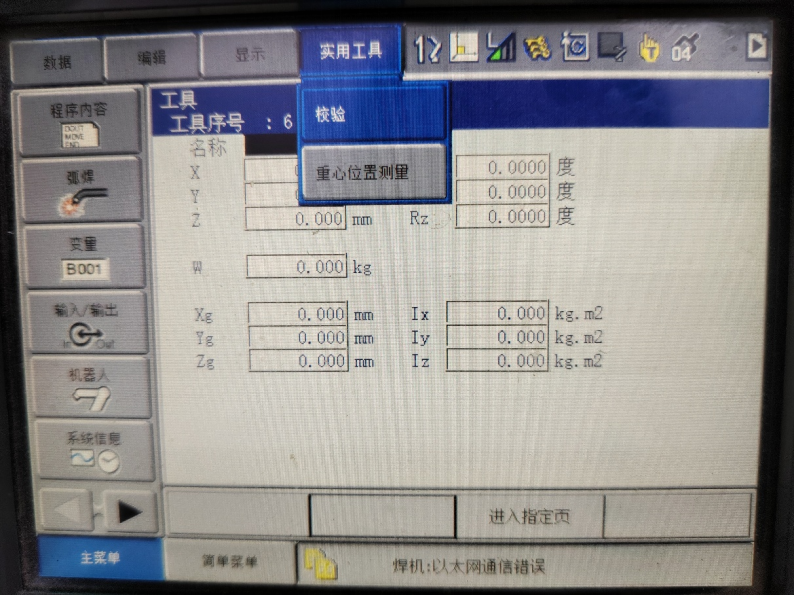
点击上方【实用工具】,选择【校验】,进入工具校验界面,如下图
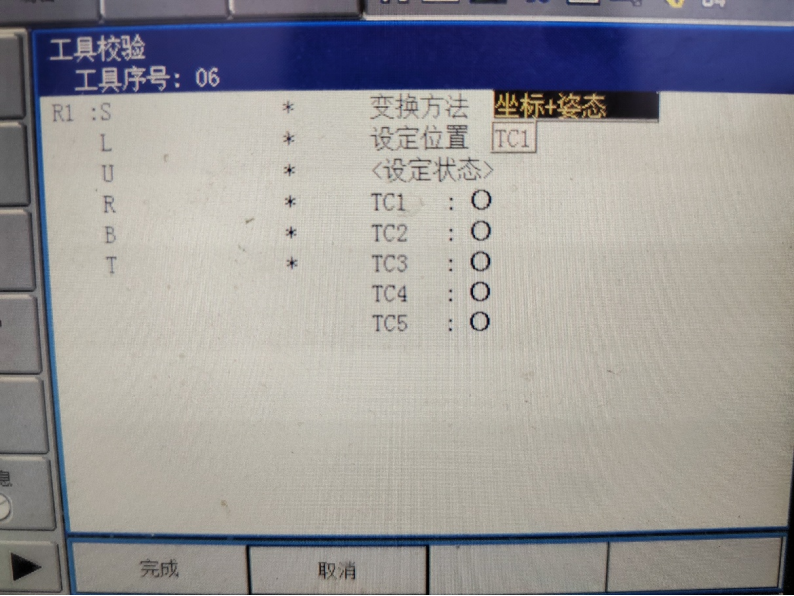
2.2 选择变换方法
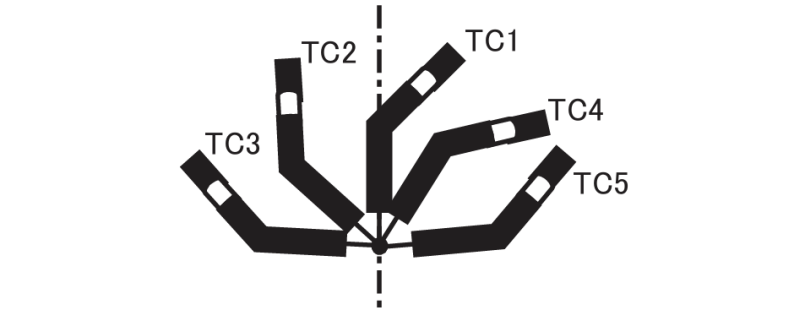
安川机器人TCP标定采用的是5点标定法,根据变换方法的不同,5个点的示教姿态要求也不一样。变换方法共有坐标、姿态、坐标+姿态三种方法。实际可根据使用要求选择合适的变换方法。
2.2.1 坐标
如果只校准位置,则对 5个点的姿态无要求,但是各姿态应尽可能的相隔大一些(这一点对所有机器人的工具位置校准都适用),否则校验值误差可能偏大。校准完成后,姿势数据(Rx、Ry、Rz)均为0。即使在一个有数据的工具中,仅使用坐标校准后,姿势数据也会被删除。
2.2.2 姿态
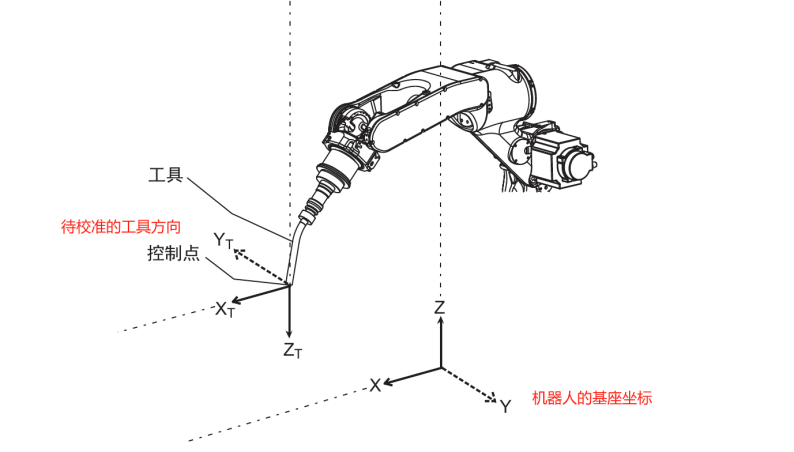
如果只校准姿态,那么只示教TC1的姿态即可,其余四点的姿态随意示教(因为校准姿态只使用了TC1)。TC1的姿态要求如下图:目标工具的z轴朝向正下方(与基座坐标z轴平行,方向相反),目标工具的x轴与基座坐标的x轴平行,朝向相同。
2.2.3 坐标+姿态
这种方法既校准位置也校准姿态,TC1的要求同校准姿态的要求一致,TC2到TC5的要求同校准位置的要求一致。
注意:无论哪种方法校准,5个示教点应保证工具控制点在同一位置。由于第一种和第三种方法会覆盖原有的姿势数据,因此,如果打算坐标和姿态分开校准,应先选中第一种或第三种方法,最后选择姿态进行校准。
2.3 选择点位进行示教
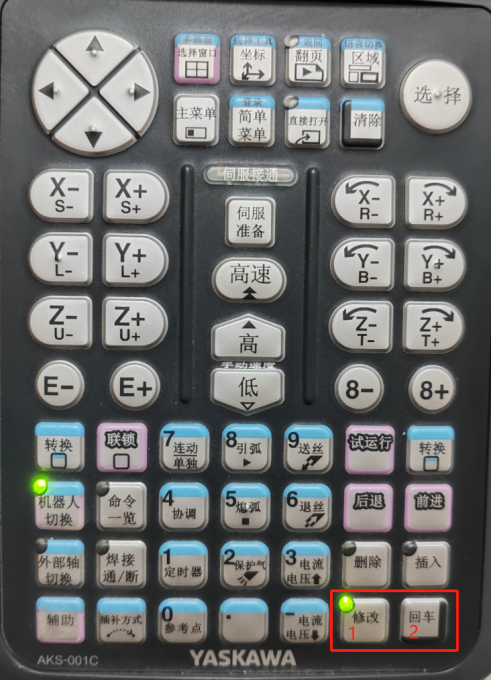
光标移动到设定位置处,按下【选择】键,选择TC1进行示教,将控制点按照上一节的要求,使用任意方式移动到特征点的位置(用来校准的尖点,一般使用针、钉子或尖锐的物体即可,但最好固定,工具校准过程中机器人底座和特征点均不允许移位,否则会导致校验值误差偏大),先点亮【修改】键,再按下回车,此时TC1后面的圆圈会变为实心,表示TC1示教完成。
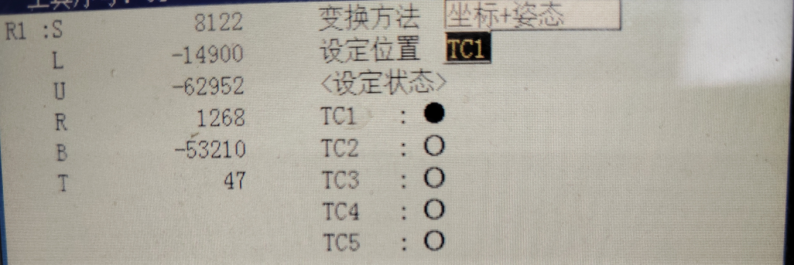
重复上述步骤,直至TC1到TC5全部校验完成(注意满足变换方法的要求),此时点击屏幕下方【完成】按钮,工具校验完成。
工具校验完成后的界面如下: