前言
本文一开始是属于此文《GRAPE——RLAIF微调VLA模型:通过偏好对齐提升机器人策略的泛化能力》的前言内容之一(该文发布于23年12月底),但考虑到其重要性,加之那么大一张表格 看下来 阅读体验较差,故抽出取来独立成文且拆分之
当时的前言是
具身的论文解读过很多之后,便会发现整个今24年的具身模型/策略大概如下所示——目前全网独一份「(建议按照从下至上的顺序看,且所有点我都做了详尽而细致的解读,点击下表中对应的文字即可阅读,我后续也会不断完善之——毕竟还有很多并未囊括于下表中,如转载请于文章开头标明本文作者July及本文链接」
有意思的是,其中的RDT、π0都通过聚合各大机器人数据集先做预训练,然后微调,且它两的参数规模也分别达到了1B、3B
大有类似大语言模型的发展路线,比如
- 17-20年,以BERT、GPT为代表的预训练-微调模式
且从GPT3起,模型的参数规模越来越大,慢慢的不再需要针对下游特定任务做微调——一个模型搞定所有任务
- 再之后,咱们经历了GPT3.5的RLHF微调
- 及至到GPT4之后,模型在各方面的能力逼近人类甚至超越人类
你说,是不是有趣?
最后,我得强调的是,本文所梳理的内容,只是让你入门具身,远远不是具身智能的全部『也不是本博客内具身系列内容的全部 且越往后 本文占比越低』,故通过本文梳理出来的内容 入门具身之后,如果继续前进,则可享受未来更远的旅程
第一部分 从训练数据来源、动作预测策略、模型训练方法
1.1 训练数据来源:视频、仿真、人工采集
在机器人领域,互联网数据、仿真数据、真实数据等这三类数据构成了主要的数据来源
- 如果采用端到端模仿学习的方法,给定一张图像并直接输出机器人动作,这通常依赖于真实世界数据
- 如果采用端到端的强化学习RL,因为需要一个可以反复交互的环境,则往往依赖于仿真数据
当然,也有先在RL仿真环境里训练一个base model,然后再在真实环境中通过模仿学习微调——这个搞法,我司七月具身项目组 便用到过
详见如下表格
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
第一大块
训练数据来源
|
人类行为视频数据 |
直接用互联网上大规模的视频数据,比如YouTube上的 |
比如DexMV、MimicPlay |
受Google的Genie的启发,利用海量的无标注视频做训练——生成或预测潜在动作token |
ViLLA、LAPA、Moto |
开源数据集 |
需要一定的整合 |
比如Open X-Embodiment等 |
合成数据 |
视频生成模型生成数据 |
比如英伟达的GR00T N1,有用到合成数据 |
仿真数据 |
毕竟仿真环境中训练base model,最后真实环境中微调,是常见训练方式 |
1 英伟达的Isaac Sim:整合了物理引擎PhysX、图像渲染引擎RTX、动画/电影描述格式USD |
2 Google的MuJoCo |
人工收集 |
手持夹爪,拍摄/录像,收集方便 |
umi/fastumi |
动作捕捉,拍摄/录像,精度较高 |
dexcap |
遥操,精度很高 |
1 主从机械臂遥操数据ALOHA
 |
2 也可以通过手持夹爪摇操机械臂,类似pika
 |
3 VR遥操Open-television、iDP3
 |
1.2 动作预测策略:以ACT、Diffusion Policy、下个token自回归预测居多
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
第二大块
动作预测策略
|
iDP3(改进的3D diffusion policy) |
可落地在人形机器人上 |
斯坦福iDP3 |
3D diffusion policy |
将3D视觉表示与扩散策略 |
3D Diffusion Policy: Generalizable Visuomotor Policy Learning via Simple 3D Representations |
Diffusion Policy(还可基于点云) |
diffusion policy基于扩散模型 |
UMI/dexcap |
Diffusion Transformer(DiT) |
基于Diffusion Transformer(DiT)改造 |
清华RDT
|
预测与动作扩散器PAD:通过联合去噪同时预测未来图像和动作 |
Prediction with Action: Visual Policy Learning via Joint Denoising Process |
ACT
|
ACT基于Transformer
|
Mobile ALOHA
|
基于下一个token预测技术,自回归式的预测动作token |
将机器人的每个动作维度分别离散化为 256 个箱子中的一个
自回归模型被训练为在给定所有先前token的情况下预测下一个token
|
RT-2、OpenVLA |
自回归版π0-FAST |
训练一个Transformer模型来自回归地预测轨迹
|
伯克利Digit |
基于文本指令和视频生成模型,预测动作轨迹
模型基于GPT风格的Transformer构建,接受经过tokenized的文本和图像序列作为输入,并输出未来图像的离散token,未来的图像则通过VQGAN解码器从这些token中解码出来,自回归生成
|
字节GR2
在大规模视频数据集上预训练且机器人数据上微调,随后预测动作轨迹和视频(含GR1详解) |
使用一种GPT 风格的transformer对这些运动token轨迹进行自回归 |
Moto:自回归方式预测未来视频片段的潜在运动token轨迹 |
1.3 模型训练方法:人形偏RL + 遥操、VLA偏预训练或微调
1.3.1 非Robotics VLM、非VLA的训练方法
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
第三大块
模型训练方法
|
直接真实环境中RL开训,摒弃仿真 |
真实环境中得到的RL数据微调VLM + 机器人动作微调:RL训练运行创建的数据集,可以用于二次训练,代替人类提供的例子(效果如何 待验证) |
UC伯克利的Sergey Levine,于24年年底在DAI 2024上的演讲:RLDG——Reinforcement Learning Distilled Generalist |
结合视觉和人类示教与纠正的RL方法,目前暂时还是小众赛道 |
UC伯克利的HIL-SERL |
RL仿真 + VR遥操 |
估计人类动作 + 人类动作到人形机器人的重定向「凡是人形,必涉及到基于AMASS数据集(包括SMPL-X做参数化建模)做人形运动目标的重新定位」 + sim to real(师生学习/策略蒸馏) + VR遥操 |
OmniH2O |
RL仿真训本体 + RGB遥操部署 |
Retargeting、Sim-to-Real、RGB Real-time遥控 |
H2O:通过重定向清除不可行的动作,然后仿真训练,最后RGB实时遥操作部署(使用训练好的Sim-to-Real模仿策略进行模仿) |
仿真中训小脑HST(仿真中训练好之后,RGB遥操部署)
且其真实中训大脑HIT |
HumanPlus:RL仿真训本体 + 人类示教(模仿学习/行为克隆)训大脑 |
静态数据训练 + 人类示教 |
比如通过示范数据做行为克隆,更结合前身ALOHA的静态数据做协同训练 |
Mobile ALOHA
某种意义上,没有显性奖励函数定义的模仿学习里,可以把对expert action(人类专家动作)的模仿看作为奖励函数
|
1.3.2 Robotics VLM和VLA训练方法:是否预训练
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
第三大块
模型训练方法
|
预训练的VLA |
先对VLM基于机器人数据(开源OXE + 自采,或只开源OXE)做二次预训练(模仿人类)变成VLA,再真实环境中微调VLA |
1 π0:先在高度多样化的开源 + 自采机器人数据上进行预训练——变成了相比不二次预训练情况下更强大的VLA,然后针对所需任务进行微调 |
2 RT2和OpenVLA:只在开源OXE上做的预训练 |
3 CogACT:把OpenVLA的离散化动作预测换成DiT |
不用预训练的VLA |
其考虑到预训练成本较高 |
TinyVLA |
预训练的Robotics VLM |
针对VLM的二次预训练,通过开源OXE训练VLM变成Robotics VLM |
Octo:在Open X-Embodiment数据集上进行预训练 |
不预训练的Robotics VLM |
没有针对VLM的二次预训练,而是直接机器人数据微调VLM变成Robotics VLM |
字节RoboFlamingo:使用简单、少量的微调就可以把 VLM 变成 Robotics VLM |
第二部分 Robotics VLM和VLA中的动作预测
2.1 微调VLM之Robotics VLM和VLA中的动作预测
2.1.1 要么专门的动作头,要么下一个token自回归预测动作,要么融合扩散头和自回归
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
微调VLM
Robotics VLM和VLA中的动作预测
|
第一类 专门的action head |
基于LSTM
|
Robotics VLM:字节RoboFlamingo |
基于diffusion model |
Robotics VLM:Octo |
VLA:TinyVLA(diffusion-based head)
VLA:Diffusion-VLA
|
VLA:DexVLA
在VLM上插上1B大小的扩散动作专家,类似Diffusion VLA |
基于gemma_300m上的流匹配(扩散模型的变体) |
VLA:π0 (流匹配微调VLM) |
基于Diffusion Transformer(DiT) |
VLA:CogACT(相比Octo的头 更大)
英伟达的GR00T N1
|
第二类 基于下一个token预测技术,自回归式的预测动作token |
对于离散化token动作表示,即指将机器人的每个动作维度分别离散化为 256 个箱子中的一个 |
VLA:RT-2、OpenVLA(相当于RT-2开源版) |
打造机器人动作专用的高效Tokenizer:比扩散π0的训练速度快5倍但效果相当 |
自回归版π0-FAST |
第三类 融合扩散与自回归动作生成 |
考虑到
扩散头训练速度慢、但推理快,比如扩散π0
自回归训练速度快、但推理慢,比如RT-2
那就结合两者各自的优势好了,以做到训练快、推理也快
|
Diffusion-VLA |
HybridVLA |
2.1.2 训练数据形式:是文本数据还是机器人数据
微调或预训练VLM而言,一个重要的问题便是训练数据的由来
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
数据形式 |
大量的图像-文本数据和少量的机器人演示数据 |
|
RT-1、Palm-e、Rt-2、RoboFlamingo
* 带下划线的是做了预训练的 |
利用带有动作标签的多样化跨机器人数据集 |
|
CrossFormer、OpenVLA、Octo、OpenX |
2.2 直接提示VLM规划的更细,但过程中加约束
如此文《让VLM充当机器人大脑——不微调直接提示VLM做顶层任务规划:从SayCan、VoxPoser到ViLA、CoPa、ReKep》所述,有
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
要求VLM规划的更细 |
让模型生成动作规划的代码 |
利用VLM和LLM的常识知识,借助模型生成代码,将常识知识映射到三维空间,具体而言 |
VoxPoser |
将高层次指令分解为一系列低层次技能 |
直接提示VLMs基于环境的视觉观察和高级语言指令生成一系列可执行步骤 |
VILA |
其利用嵌入在基础模型中的常识知识(比如视觉语言模型的代表GPT-4V)为开放世界机器人操控生成一系列6自由度末端执行器姿势 |
1 任务导向抓取,类似抓到锤柄
使用视觉语言模型(VLMs) 比如GPT4-V,通过一种新颖的粗到细的定位机制选择对象的抓取部件(这句话的意思类似,好比人拿一个锤子去钉钉子时,是知道用手去拿锤子的锤柄,而非锤头)
2 任务感知运动规划,类似拿打击面对准钉子
再次利用VLMs来识别与任务相关的对象部件的空间几何状态(或约束),然后用于推导抓取后的姿势
|
CoPa |
利用大模型(如 VLM 或 LLM)来推断和指定任务关键点的关系 |
也就是说,这些关系并非由人工定义,而是依赖于大模型的推理能力及其内在的知识 |
ReKep |
第三部分 架构层面:是否端到端及借鉴大语言模型的发展之路
3.1 从VLM规划、到微调VLM得到VLA,再到大脑VLM 小脑VLA、VLA中的分层
3.1.1 两个模型 大小脑各干各的:VLM做规划、小脑做控制
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
两个模型,大小脑各干各的 |
通过VLM规划
上层任务规划策略和下层操作策略
|
VLM
上层任务规划策略主要是基于文本指令和当前环境信息,利用多模态大模型技术进行任务规划,输出为文本动作序列
|
SayCan、PaLM-E(组合的PaLM + ViT)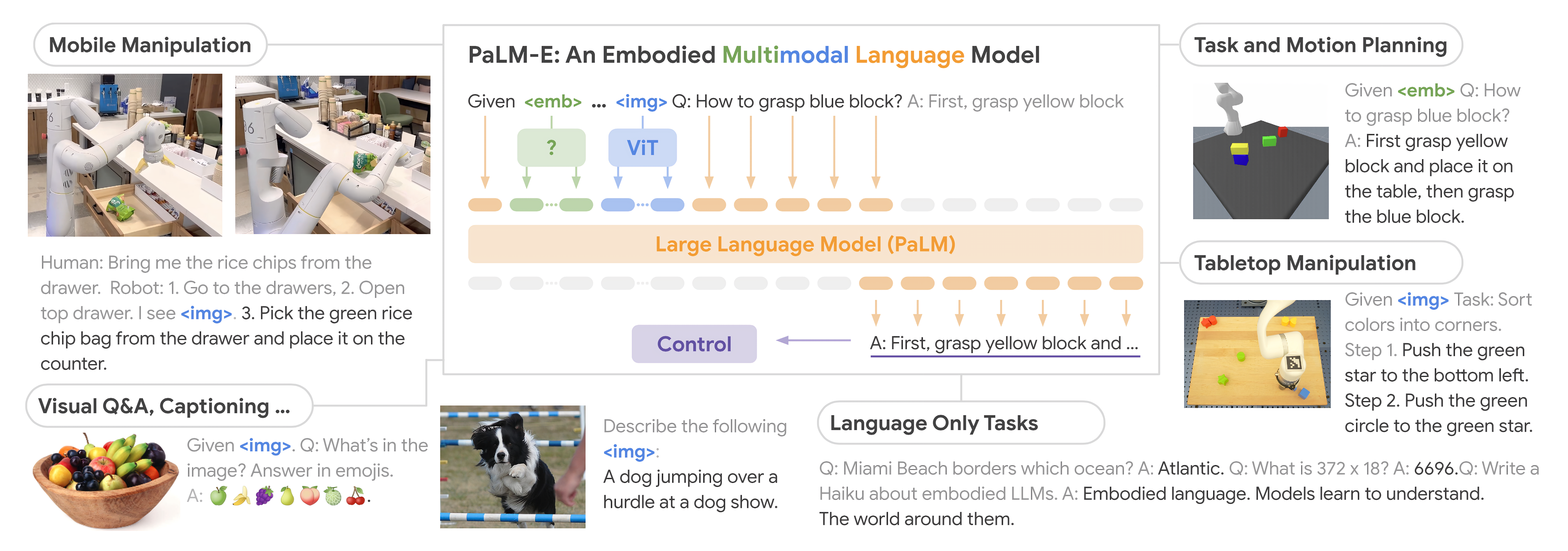 |
下层操作策略主要是指让机器人学会各种操作技能
输入是技能标识(文本或轨迹)和当前状态信息(环境和机器人本体),输出是末端姿态或关节角度
|
RT-1、RT-Trajectory、MT-ACT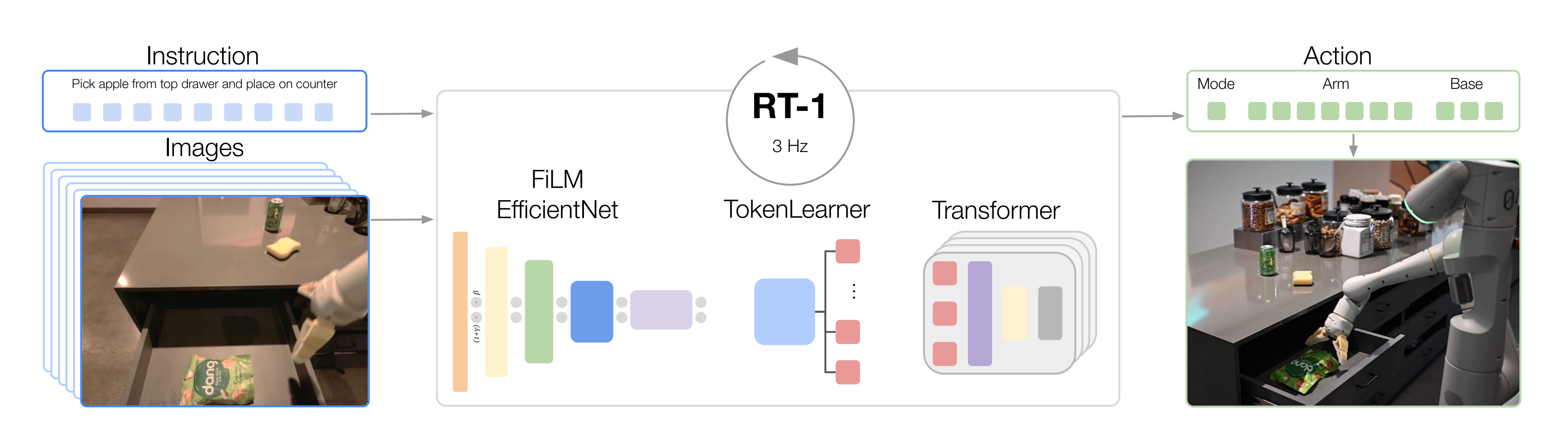 |
3.1.2 大小脑整合成一个模型:微调VLM得到VLA
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
大小脑整合成一个模型 |
微调VLM得到:端到端VLA
大小脑合并,从感知直接映射到运动
|
输入为文本指令、图像,输出则是机器人操作动作(末端姿态) |
RT2、OpenVLA、π0(VLM + 动作专家)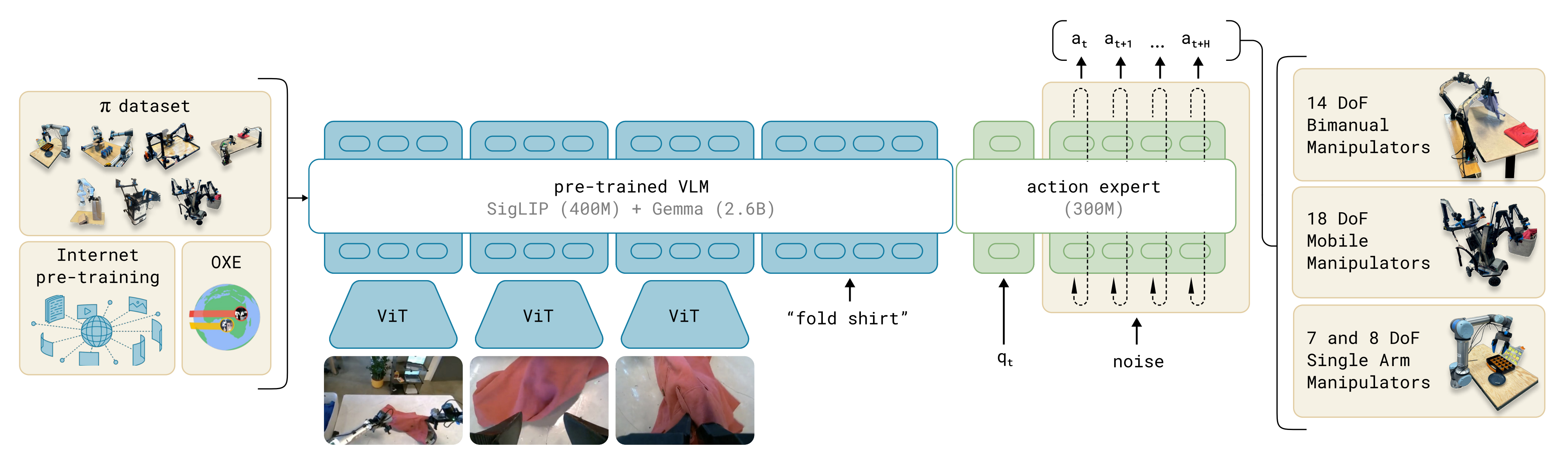 |
3.1.3 大小脑两个模型:大脑VLM 小脑VLA
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
大小脑两个模型,但小脑是VLA |
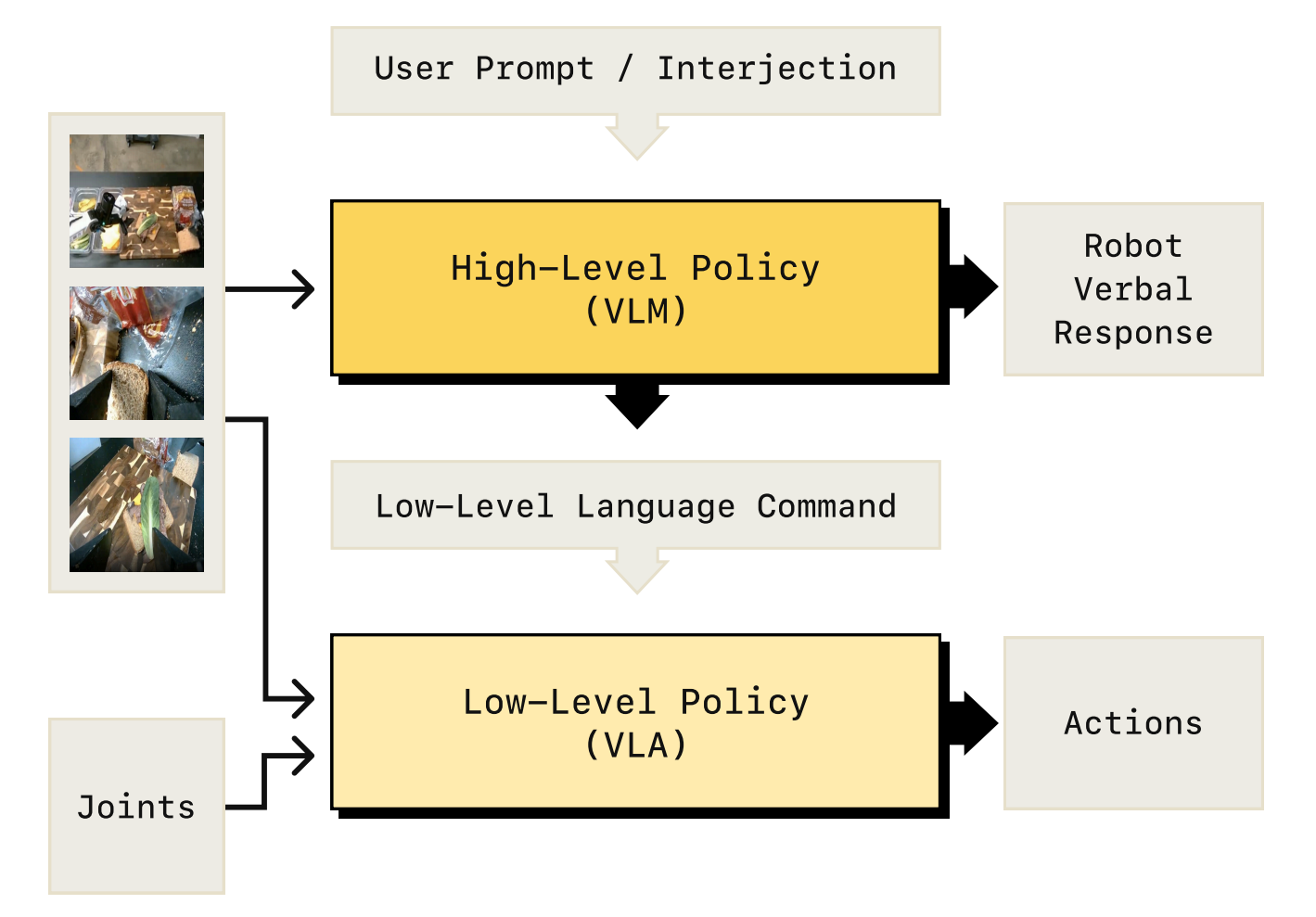
大脑VLM,小脑VLA
|
基于「VLM的高层次推理+ VLA低层次任务执行」的复杂指令跟随及交互式反馈 |
Hi Robot
 |
3.1.4 大小脑整合成一个模型,但分层以各司其职:慢思考 快反应
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
大小脑整合成一个模型,但各司其职 |
为加强推理,VLA中 的分层
最终慢思考、快反应
|
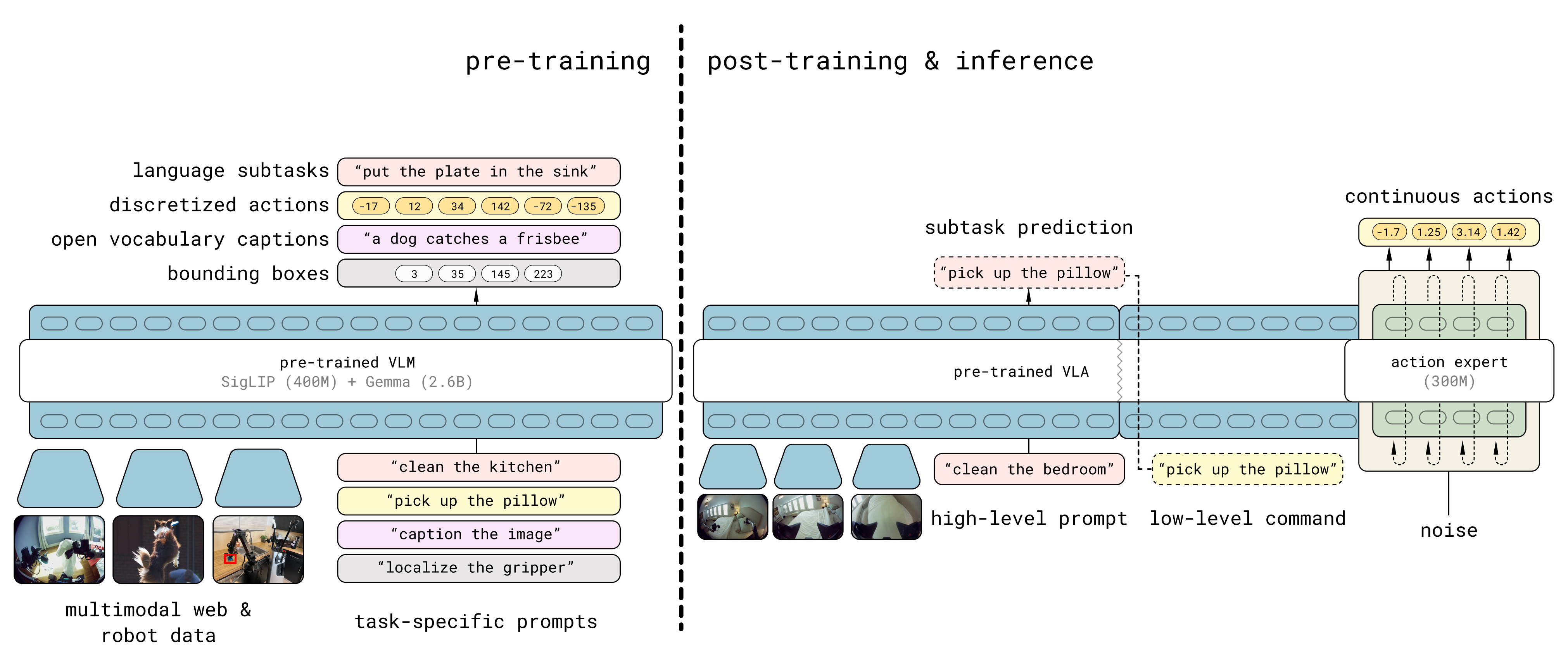
同一个模型中先高层拆解出子任务,后低层执行子任务
|
π0.5 (至于Helix和GR00T N1下个部分介绍)
 |
|
3.2 借鉴大语言模型的发展之路(含3D版的VLA)
2024年具身前沿模型/策略大汇总 |
大类 |
子类/说明 |
典型代表 |
借鉴大语言模型的发展之路 |
让VLM充当机器人大脑,做顶层任务规划 |
机器人基础模型(相当于大脑):用于整体任务规划
机器人操控模型(相当于小脑):用于精确控制 |
Figure 01、清华ViLA、CoPa |
基于VLM模型GPT-4o和关系关键点约束 |
rekep |
预训练-微调模式中把模型搞大 |
需要架构、数据双双具备 |
RDT、π0 |
把RLHF引入近具身 |
通过偏好对齐提升机器人策略的泛化能力 |
GRAPE |
把CoT引入具身 |
让具身模型学会逐步推理 |
ECoT
CoT-VLA
清华Embodied-R
Fast ECoT
|
把3D引入具身 |
|
3D VLA
PointVLA
SpatialVLA
|
让大模型来打辅助 |
VLM解释人类演示视频,并为机器人生成任务计划、代码 |
纽约大学:VLM See, Robot Do |
结合「GPT4V的open-world vision能力」和重定向 |
OKAMI |
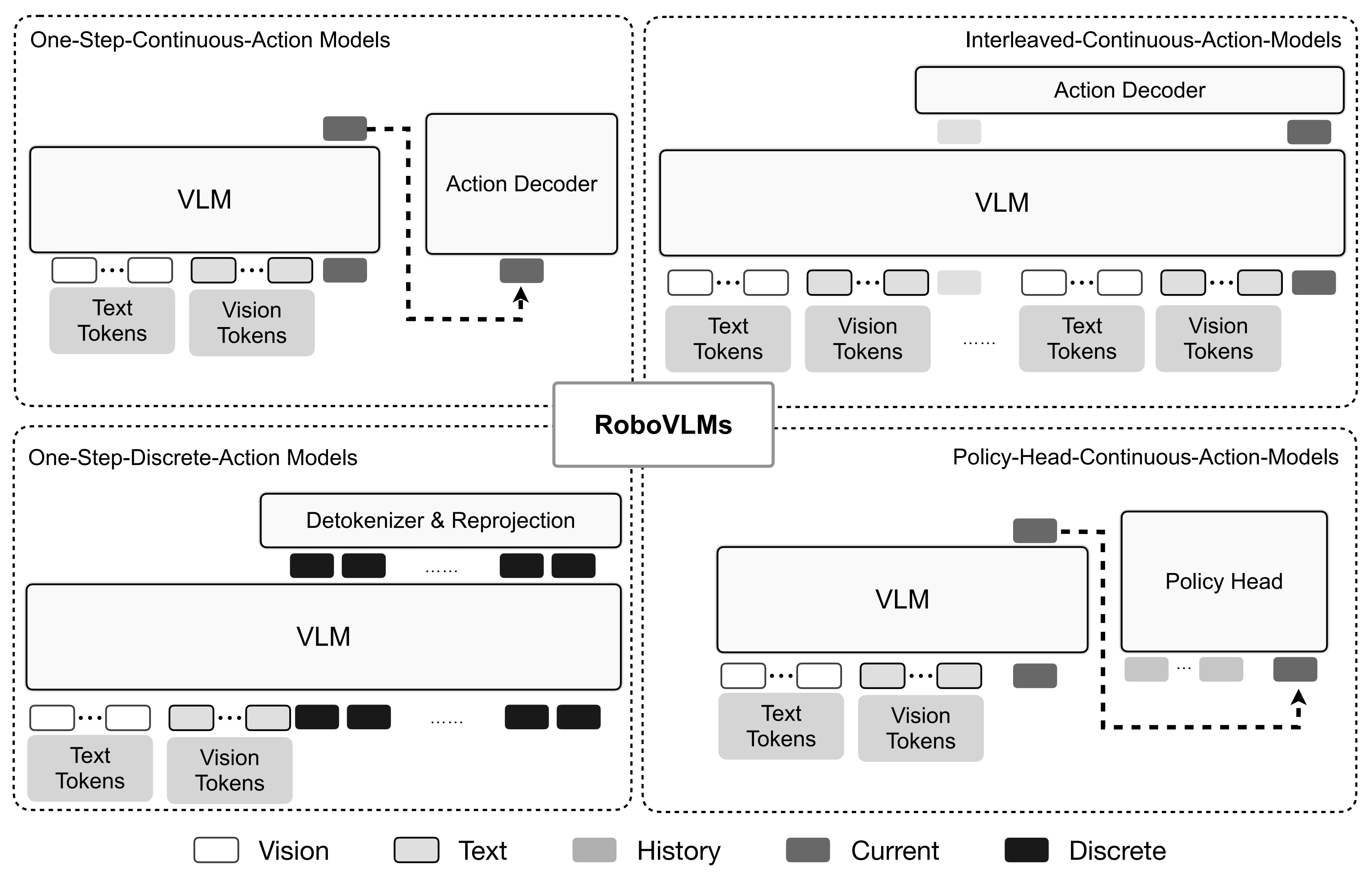
更多可以查看此文《RoboVLM——通用机器人策略的VLA设计哲学:如何选择骨干网络、如何构建VLA架构、何时添加跨本体数据》
第四部分 通用人形VLA的发展之路:慢思考(以类似o1/R1加强推理)、快反应
通用人形VLA的发展之路 |
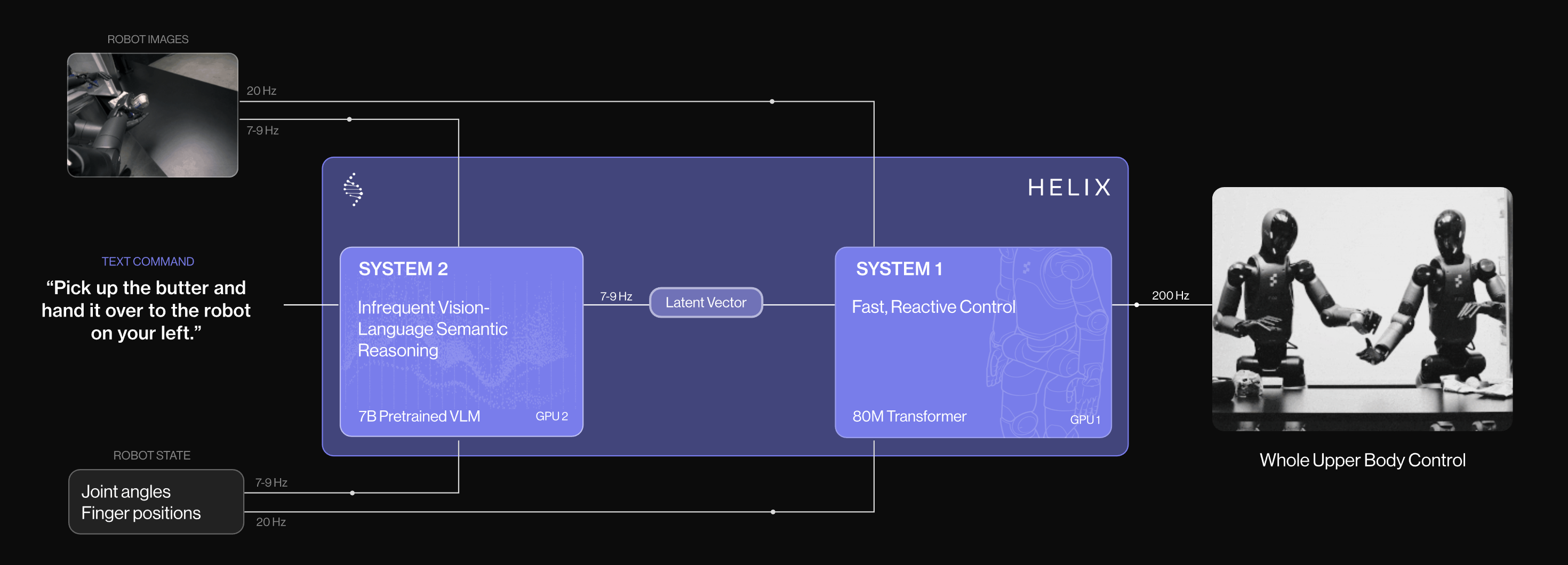
端到端 VLA下的快慢双系统 |
人脑的双系统机制
系统二的慢思考
系统一的快反应与
两个系统都会接受外部观测
|
Helix / HiRT
 |
|
VLM慢思考、DiT快反应
但DiT 不接收外部图像,外部图像的信息从VLM过来
|
GR00T N1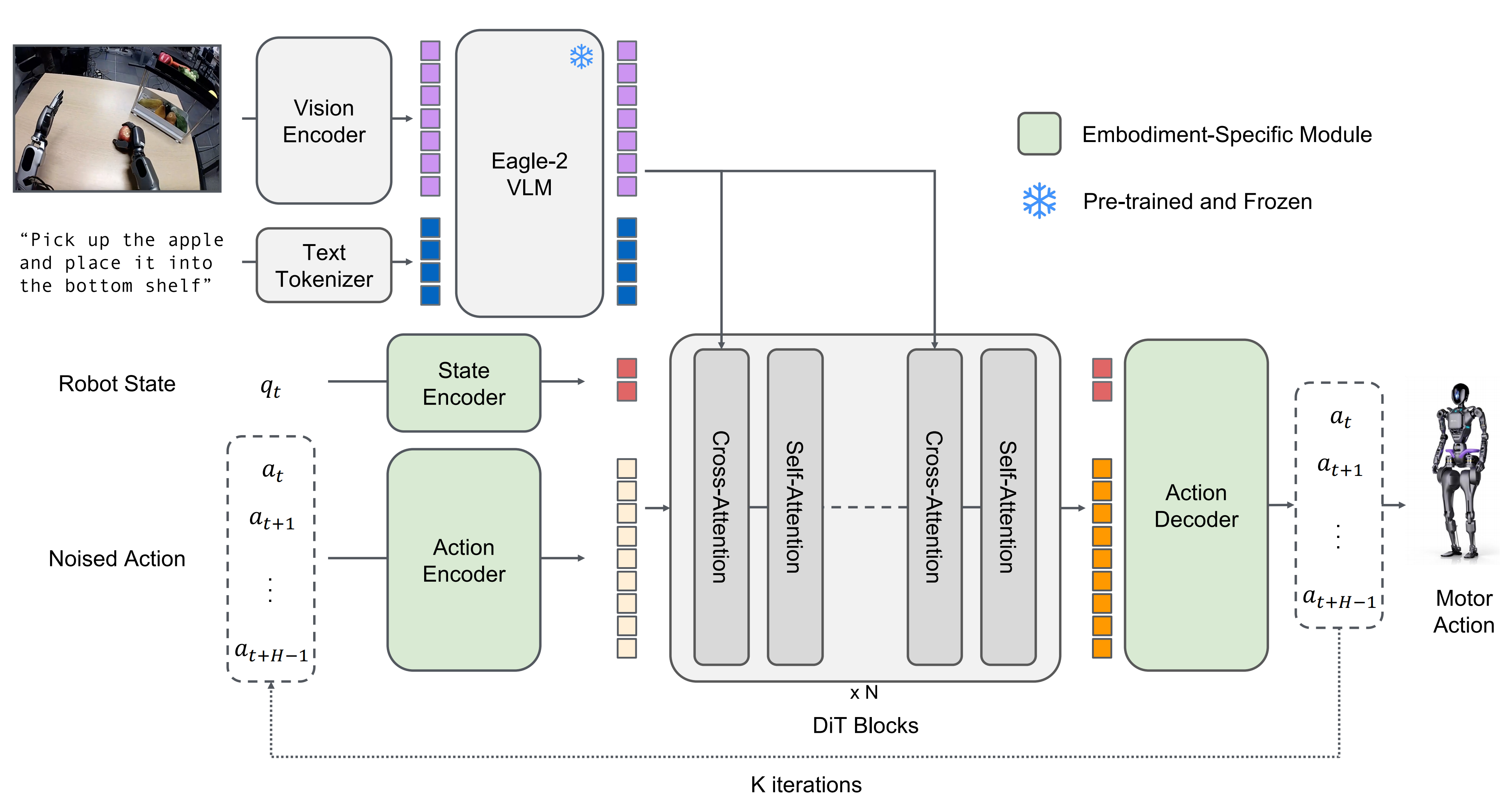 |
本文暂只更新到25年Q1,更多内容请看本博客内的其他文章


