汇川机器人软件RobotLab常规操作_汇川机器人软件inorobotlab教程
一.权限管理注意事项
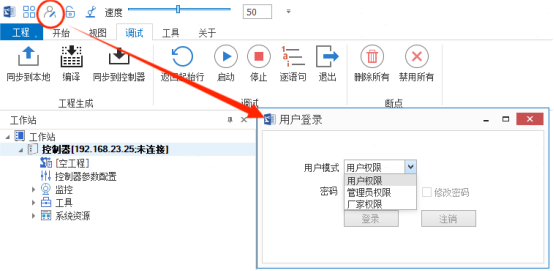
1.1 软件登录权限管理
连接上软件后,修改轴参数、点位数据需要权限。点击人物图标,登录对应的权限,管理员权限登录密码6个0。
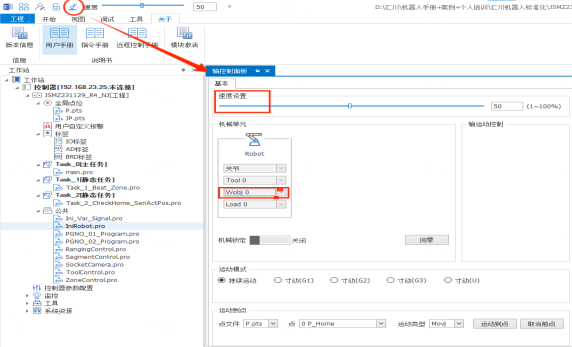
1.2机器人控制权限管理
点击“锁”,打开机器人控制权配置页面。
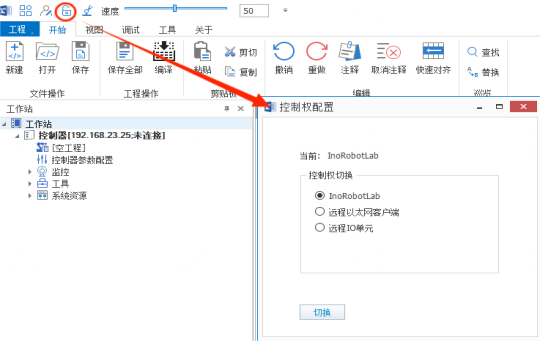
选择“InoRoboLabt”,机器人受编程软件控制,使用软件可手动移动点位、示教位置信息。
选择“远程IO单元”,机器人受外部设备控制如PLC、上位机,机器人进入自动模式,收到交互信号就按照程序执行。
选择“远程以太网客户端”,机器人受远程客户短控制,用于查找问题、远程调试。
二、 使用过渡点注意事项
程序中点到点直线运动会有机构干涉或有安全风险时,使用过渡点在运动规避风险。

使用过渡点时,注意指令的工具坐标系,选择正确的Wobj工具好,否则运动出错有撞机风险。
如下图所示为例,wobj0为A工位,wobj1为B工位,注意在“轴控制面板”中选择对应工具坐标号
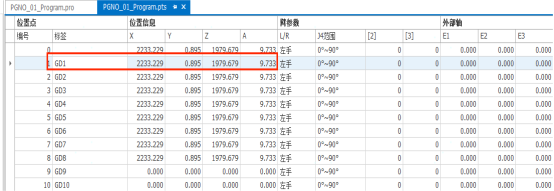
三、使用全局点位移动注意事项
双击左侧“P.pts”,打开全局点位列表。
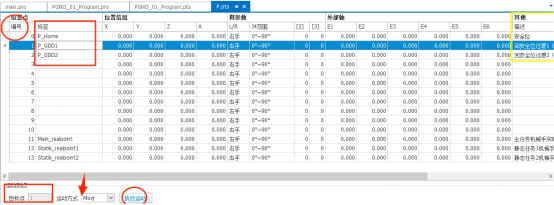
程序使用全局点位移动一般有两种形式
1)程序调用编号走位,如Movj P[0]
2)程序调用自定义标签名,如Movj P_Home
在程序内使用指令进行点位移动、示教过程中,注意检查运动方式、标签和描述内容。
四、点位示教注意事项
打开“轴控制面板”,选择正确的直角坐标系和工具号(例如拧紧工位工位一选择0号,工位二选择1号),速度不可设置过高。
注意不能切换工具号和用户号时,检查机器人是否在示教模式并且主任务处于运行中,或再现模式时下也不支持切换。
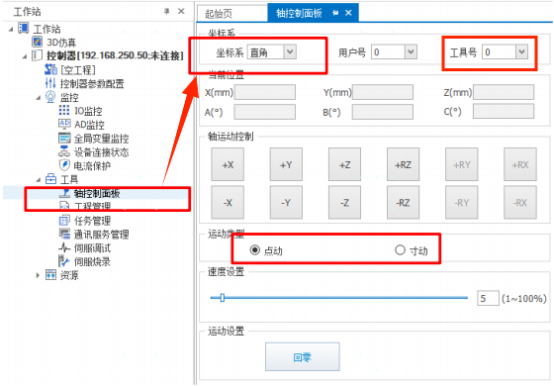
选择寸动模式,点击X、Y、Z、R将机器人移动到目标位置
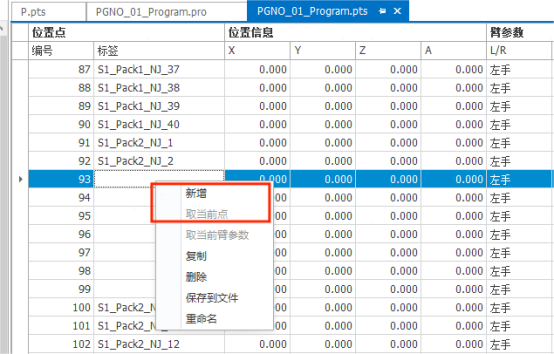
在程序中点击右键,选择“查看点数据”,在打开的程序位置点中,右键选中空白行,点击“取当前点”,则机器人当前位置信息就存入系统中。
注意要编辑合适的标签名,提示当前点位的功能,方便程序阅读。
五、全局变量监控注意事项
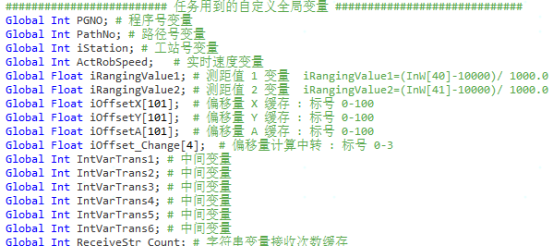
程序中包含大量的全局变量(定义的Global变量)
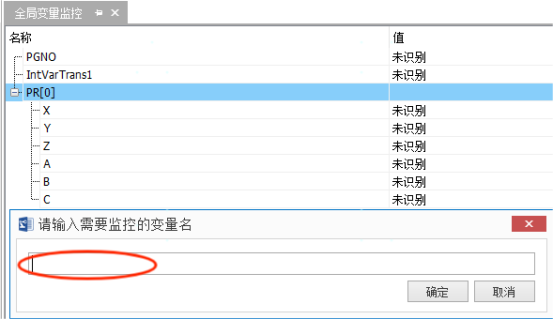
在全局监控表中单个添加时名字输入错误时会导致添加失败,可在程序内添加监控。
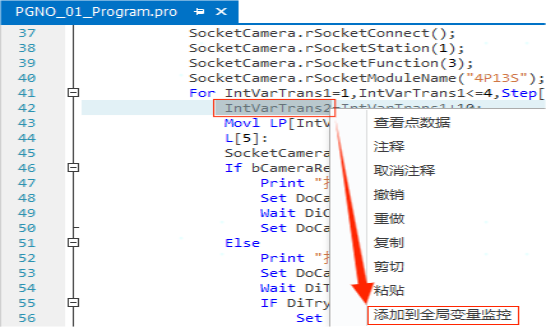
可在程序内选中变量,鼠标点击右键,选择“添加到全局变量监控”。
注意变量值显示为“未识别”时,检查当前程序块运行是否包含此变量,否则无法从控制器查询到数值,监控列表中变量值必须在值被有效刷新的时候才能查看到。
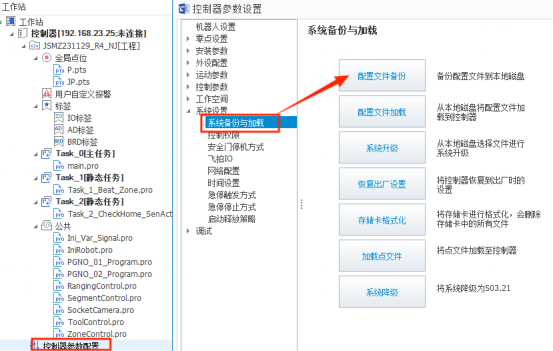
六、程序备份注意事项
点击“配置文件备份”,选择保存路径,输入文件名后确认,待系统提示“备份配置文件完成”则表示备份完成。
注意不能将多台机器人的配置文件相互导入,会导致机器人的出厂设置参数改变,后果不可预料。导入后降低程序运行速度和轴移动速度,验证配置是否正确。