一文读懂全球26家自动驾驶仿真软件:功能、优劣势与适用场景(Carsim/CarMaker/SCANeR/VTD/51/Silab等等..)_自动驾驶仿真平台
-
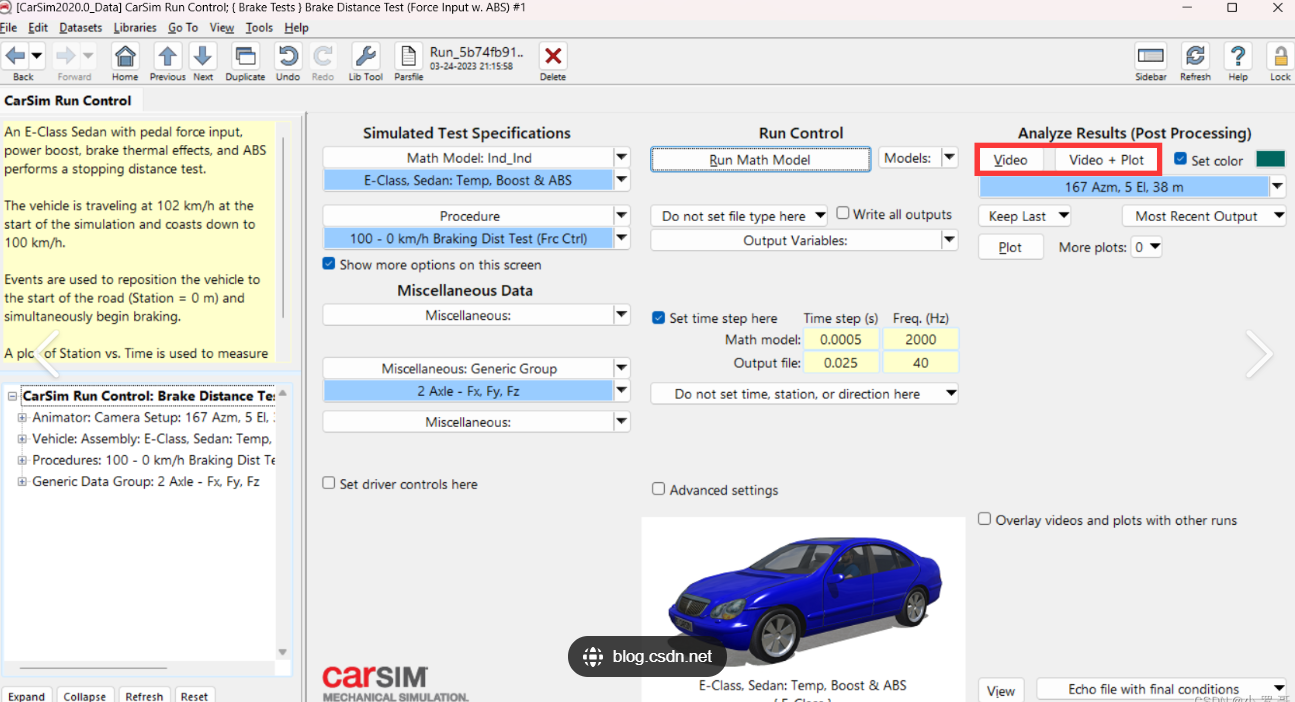
CarSim (Mechanical Simulation Corporation - MSC Software)
-
CarMaker (IPG Automotive)
-
简介: 提供从车辆动力学、轮胎、道路到驾驶员、交通环境及传感器的综合仿真平台。
-
优点: 功能全面,模型精度高,场景构建能力强,支持硬件在环(HIL)、驾驶员在环(DIL),用户界面友好,与MATLAB/Simulink深度集成。
-
缺点: 整体成本较高。

-
-
SCANeR studio (AVSIMULATION)
-
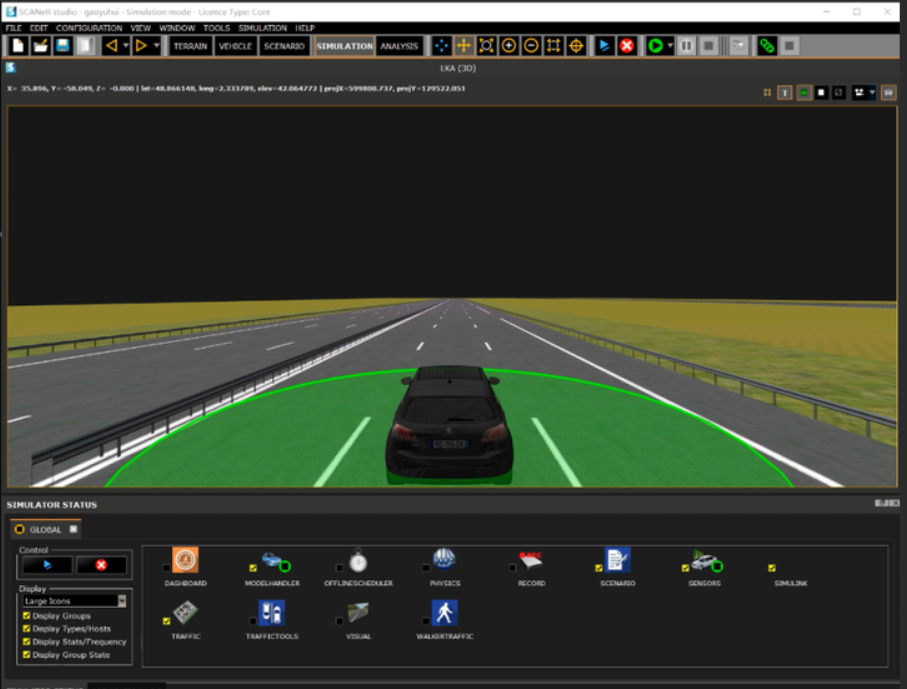
简介: 老牌的综合驾驶模拟平台,广泛应用于汽车、航空、轨道交通等地方。
-
优点: 专为驾驶模拟器设计,提供全栈解决方案(场景、车辆动力学、音频、运动平台接口、HMI工具链)实时性优化最佳(尤其运动反馈延迟控制)提供高度灵活的交通行为建模(换道、合流、交叉路口优先级规则等)大量论文研究基于SCANeR的复杂交通场景生成与多智能体交互(尤其在欧洲交通研究机构)
-
缺点: 配置相对复杂,学习曲线较陡。
-
-
PreScan (Siemens Digital Industries Software)
-
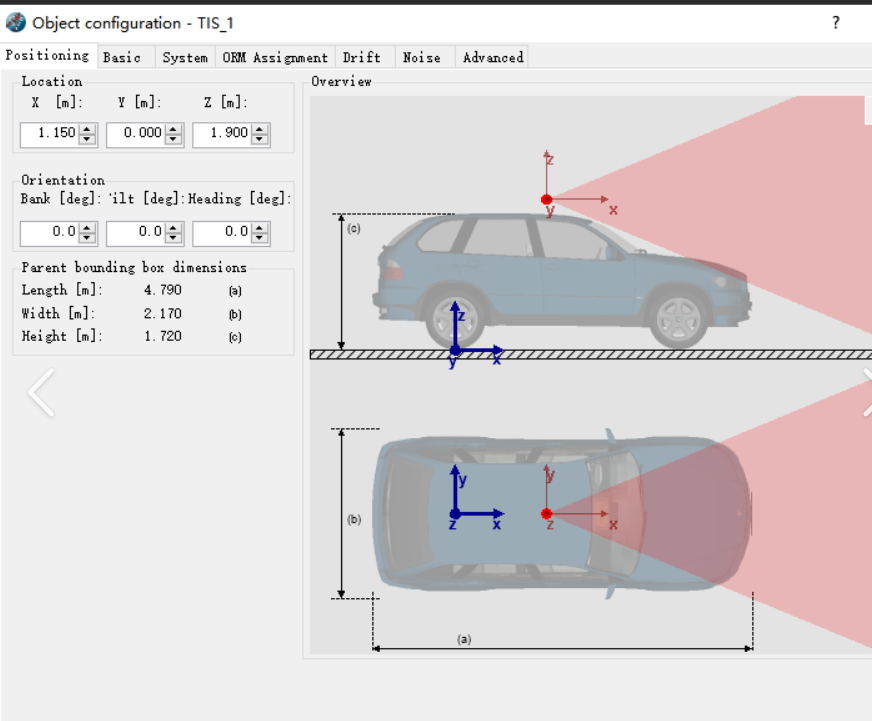
简介: 专注于传感器(摄像头、雷达、激光雷达、超声波、V2X)物理级建模和场景仿真的平台。
-
优点: 传感器建模是其强项,场景编辑可视化程度高,内置大量标准场景库,与Simulink集成良好。
-
缺点: 车辆动力学模型相对CarSim/CarMaker较弱,复杂交通流模拟能力有限。
-
-
PTV Vissim (PTV Group)
-
简介: 世界领先的微观交通流仿真软件。
-
优点: 交通流仿真能力极强,模型成熟,广泛应用于交通规划和管理,支持复杂的交通行为建模。
-
缺点: 主要用于宏观/微观交通流分析,车辆动力学和传感器仿真能力不足,需与其他工具(如CarSim/PreScan)结合用于自动驾驶仿真。
-
-
SUMO (Simulation of Urban MObility)
-
简介: 开源的、高度可扩展的微观交通流仿真软件。
-
优点: 完全免费开源,社区活跃,可定制性高,路网处理能力强,常用于大规模交通场景生成。
-
缺点: 原生界面较为基础,车辆模型简单(无详细动力学),传感器仿真需要额外开发或集成。
-
-
VIRES VTD (VIRES Simulationstechnologie GmbH)
-
简介: 功能强大的综合虚拟测试驾驶平台。
-
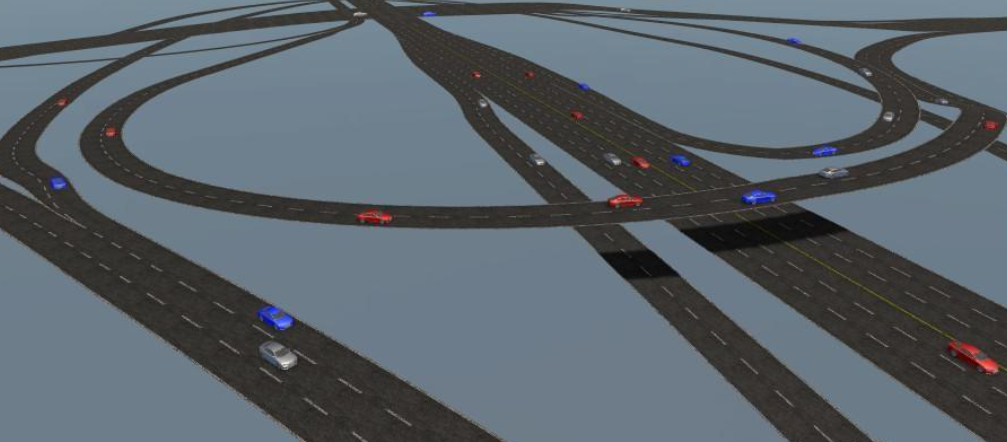
优点: 场景渲染逼真度高(尤其夜景、恶劣天气),传感器模型先进(物理级),支持分布式仿真,模块化设计,广泛应用于ADAS和自动驾驶HIL/SIL测试。
-
缺点: 系统复杂,成本高昂、只能安装在Linux系统

-
-
rFpro (rFpro)
-
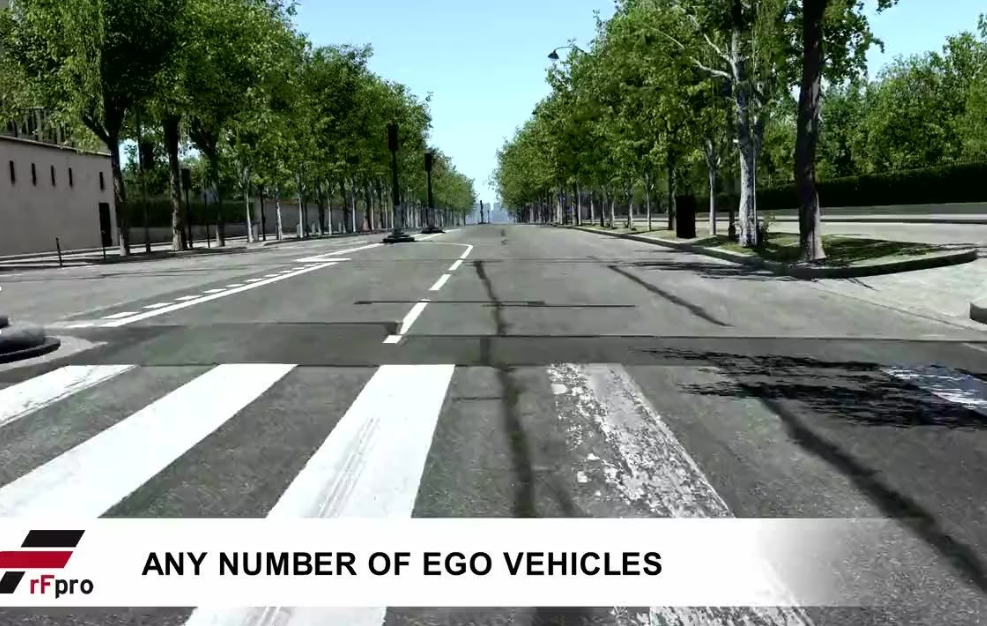
简介: 专注于提供高精度、可重复使用的数字道路场景。
-
优点: 以厘米级精度扫描真实道路生成场景,保真度极高,支持多种仿真软件(CarMaker, VTD, CarSim等)导入,是构建高可信度测试环境的关键。
-
缺点: 本身不是完整的仿真引擎,需要与其他动力学或感知仿真工具配合使用。
-
-
Cognata
-
简介: 基于云的自动驾驶仿真平台,强调利用AI和大数据技术。
-
优点: 云原生架构支持大规模并行仿真,AI驱动场景生成和交通流,数字孪生技术快速重建真实城市,提供场景库和分析工具。
-
缺点: 云服务依赖网络,对本地化部署支持可能有限。

-
-
RightHook (Applied Intuition 收购)
-
简介: 提供基于真实世界数据的场景生成和测试管理平台。
-
优点: 擅长将真实路采数据快速转化为可执行的仿真场景,测试管理工具链完善。
-
缺点: 被Applied Intuition收购后,其能力整合到更广泛的生态中。
-
-
Parallel Domain
-
简介: 基于云的仿真平台,核心是使用合成数据生成技术创建高度逼真且多样化的传感器数据。
-
优点: 合成数据生成能力强大,可定制化程度高(天气、光照、物体、传感器参数),用于高效训练和测试感知算法。
-
缺点: 更侧重于感知数据生成,车辆动力学和闭环控制仿真需要集成。

-
-
Metamoto (被丰田收购)
-
简介: 曾是基于云的“仿真即服务”平台。
-
现状: 已被丰田收购,技术整合到丰田内部研发体系中。

-
-
ESI Pro-SiVIC (ESI Group)
-
简介: 专注于物理级传感器(摄像头、雷达、激光雷达、红外)建模和场景仿真的平台。
-
优点: 传感器物理模型深入,支持多传感器融合仿真,场景构建能力较强。
-
缺点: 在车辆动力学和复杂交通流模拟方面相对较弱,市场知名度略低于头部玩家。
-
-
NVIDIA DRIVE Constellation
-
简介: 基于NVIDIA GPU和其Omniverse平台的端到端自动驾驶仿真系统。
-
优点: 强大的实时渲染能力(光线追踪),物理精确的传感器仿真,支持硬件在环(与DRIVE AGX硬件集成),可扩展性强。
-
缺点: 与NVIDIA硬件生态绑定较深,整体成本高。

-
-
CARLA (CARLA Team)
-
简介: 由社区驱动的开源自动驾驶仿真平台。
-
优点: 完全免费开源,社区活跃,模块化设计易于扩展,支持传感器仿真(摄像头、激光雷达等)和基本车辆控制,是学术研究和初创公司原型验证的热门选择。
-
缺点: 车辆动力学模型精度有限,场景逼真度和渲染质量(原生)不及商业软件,大规模复杂场景性能可能受限。

-
-
AirSim (Microsoft Research)
-
简介: 微软开源项目,最初为无人机设计,后扩展支持汽车仿真。
-
优点: 开源免费,基于Unreal Engine,渲染质量好,物理引擎支持(PhysX),支持多种传感器(摄像头、深度、IMU等),API友好(Python/C++)。
-
缺点: 汽车动力学模型相对简单,交通流和场景编辑工具链不如专业汽车仿真软件完善,开发重心似乎更偏向航空。

-
-
LG SVL Simulator (LG Electronics)
-
简介: LG电子开源的自动驾驶仿真器。
-
优点: 开源免费,基于Unity引擎,渲染效果好,支持多传感器(包括激光雷达点云生成),提供与Apollo、Autoware等开源自动驾驶栈的集成接口。
-
现状: 重要更新: LG SVL Simulator 项目已于2023年底宣布停止维护。其部分技术和理念已被百度Apollo等吸收整合。
-
-
51Sim-One (五一视界)
-
简介: 国内领先的全栈式自动驾驶仿真测试平台。
-
优点: 功能全面(动力学、传感器、场景、交通流、V2X),强调中国特色的交通场景和驾驶员行为模型,支持云仿真和数字孪生,提供工具链和测试服务。
-
缺点: 作为国内头部玩家,面临国内外众多竞争对手的压力。
-
-
Pilot-D GaiA (希迪智驾)
-
简介: 希迪智驾推出的智能驾驶仿真与测试平台。
-
优点: 结合希迪在商用车自动驾驶和V2X领域的经验,提供场景库、测试工具和云平台服务。
-
缺点: 相对较新,市场覆盖度和知名度仍在提升中。
-
-
PanoSim (同驭汽车科技)
-
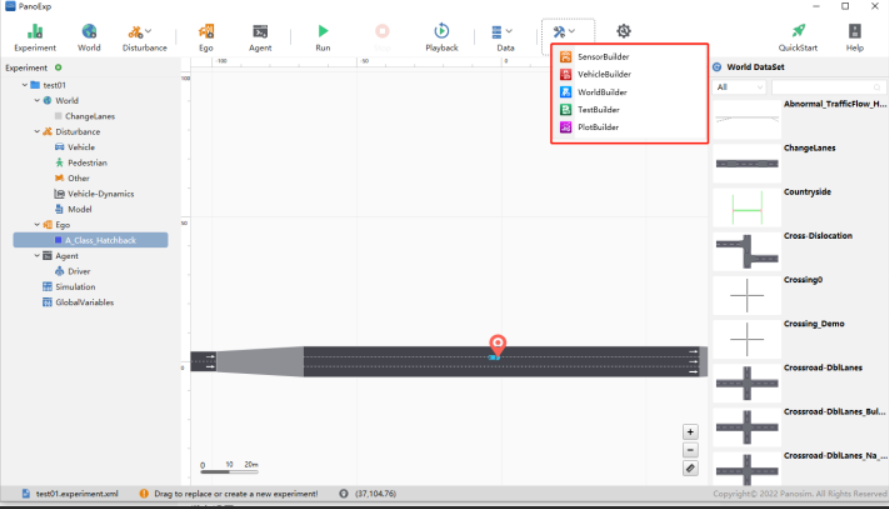
简介: 提供车辆动力学、环境感知、智能交通、驾驶模拟等一体化仿真平台。
-
优点: 历史较长,在高校和科研机构中有一定用户基础,功能覆盖较广。
-
缺点: 商业化程度和行业影响力相比头部企业有待加强。
-
-
AAI (AAI)
-
简介: 国内专注于提供高精度车辆动力学模型和仿真解决方案的公司。
-
优点: 在车辆动力学建模方面有深厚积累,模型精度高。
-
缺点: 在传感器仿真和复杂场景构建方面可能需要与其他工具配合。
-
-
百度 Apollo 仿真平台 (百度)
-
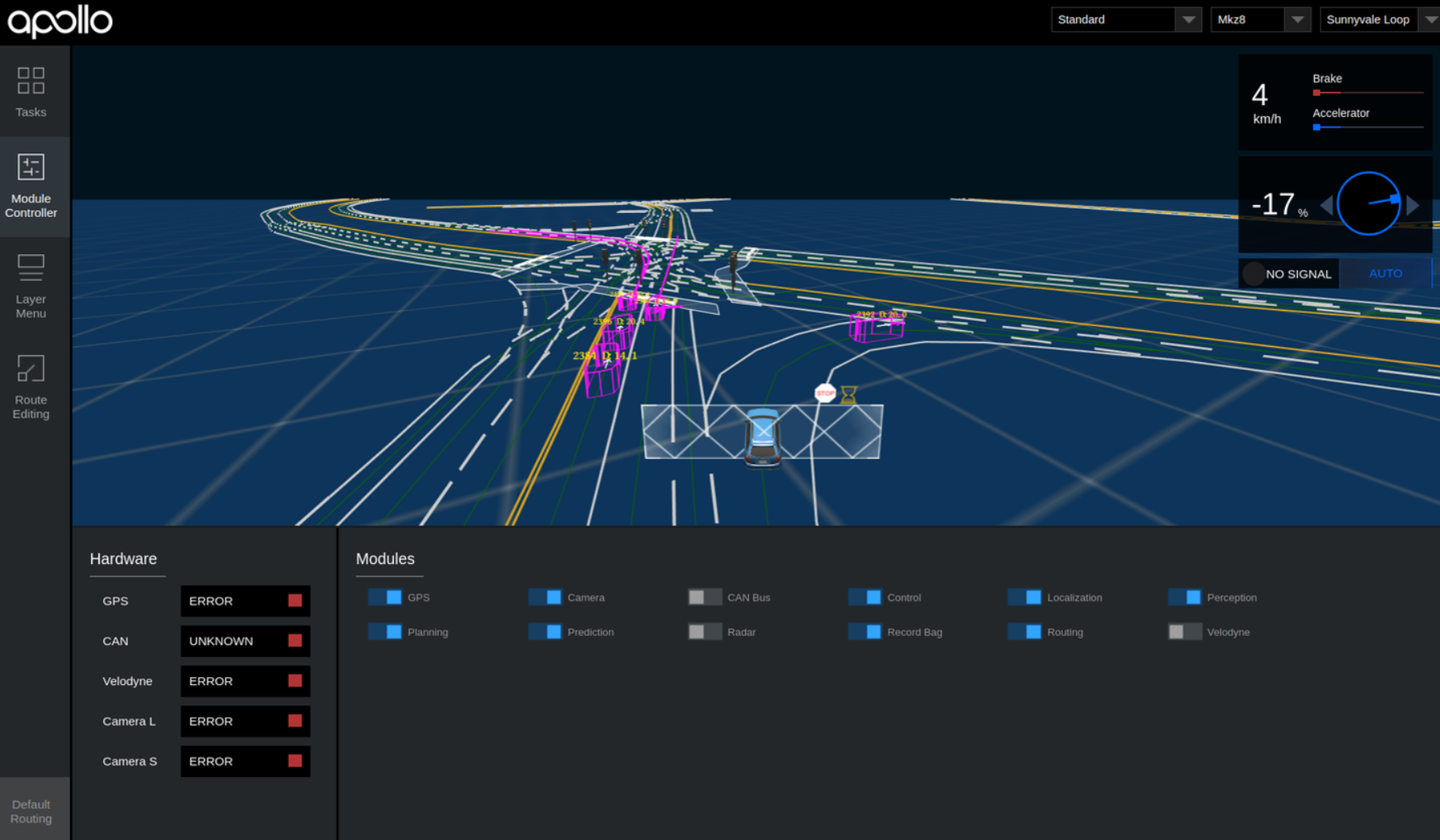
简介: 百度Apollo开放平台的重要组成部分,为其自动驾驶系统提供仿真测试能力。
-
优点: 与Apollo开源生态深度集成,支持云端大规模并行仿真,场景丰富(尤其中国场景),提供数据驱动和AI驱动的场景生成,整合了部分原LG SVL Simulator的能力。
-
缺点: 与Apollo生态绑定较紧,对其他自动驾驶系统的适配性可能不如中立平台。
-
-
腾讯 TAD Sim (腾讯)
-
简介: 腾讯自动驾驶仿真测试平台。
-
优点: 背靠腾讯强大的游戏引擎(如虚幻引擎)能力,渲染效果逼真,利用游戏AI技术生成高自由度交通流和智能体行为,结合云计算能力,支持虚实结合的数字孪生。
-
缺点: 商业化进展和行业合作案例披露相对较少。

-
-
SILAB
-
优点: 界面简单、适合教学
-
缺点: 车辆动力学、传感器方面有待提高

-
-
Waymo Carcraft (Waymo)
-
简介: Waymo内部开发的、高度定制的仿真系统,是其技术领先的核心支柱之一。
-
特点: 非商业化产品。核心优势在于其庞大的真实路测数据驱动,能精确重建海量真实驾驶场景(包含长尾场景),并进行高效的大规模并行仿真测试(“虚拟里程”远超实际路测)。与Waymo独特的硬件和软件栈深度集成。
-
评价: 代表了行业顶尖水平,体现了仿真在自动驾驶研发中的巨大价值,但其技术和数据并不对外开放。
-
-
TESS NG (交通部公路院 & 东南大学)
-
简介: 新一代国产微观交通流仿真系统,由交通运输部公路科学研究所和东南大学联合研发。
-
优点: 国产化,针对中国交通特点(混合交通流)进行优化,性能高效,正在积极发展面向车路协同和自动驾驶的仿真能力。
-
缺点: 在自动驾驶车辆详细动力学和传感器仿真方面需要与其他工具结合。

-
总结与展望
自动驾驶仿真软件市场呈现出多元化发展的格局:
-
巨头林立: 传统动力学巨头(CarSim, CarMaker)、综合平台(VTD, SCANeR)、传感器专家(PreScan, Pro-SiVIC)、云仿真新锐(Cognata, Parallel Domain)、科技巨头(NVIDIA, 腾讯)以及汽车巨头自研(Waymo)都在激烈竞争。
-
开源力量: CARLA、AirSim等开源项目极大地降低了研究门槛,促进了创新。
-
中国崛起: 51Sim-One、腾讯TAD Sim、百度Apollo仿真、PanoSim等国内厂商发展迅速,在本地化场景、云服务、AI应用等方面展现出特色。

