STM32与陀螺仪I2C通信编程指南
本文还有配套的精品资源,点击获取 
简介:STM32微控制器通过I2C与陀螺仪通信是嵌入式系统中实现传感器数据获取的常用方式。本文介绍了如何通过STM32的I2C接口与LSM6DS33陀螺仪进行数据交互,包括I2C接口配置、陀螺仪配置寄存器设置、读写操作和数据解析等关键步骤。并提供了一个可能包含示例代码的“LSM6DS33测试”压缩包,以帮助开发者深入理解并掌握STM32与陀螺仪之间的I2C通信。
1. STM32微控制器与陀螺仪通信概述
在现代的嵌入式系统设计中,传感器的集成对于实现各种功能至关重要。STM32微控制器,以其高性能、灵活性和丰富的外设支持,成为众多应用的首选。而陀螺仪作为测量或维持方向稳定的传感器,广泛应用于姿态检测、运动追踪等地方。将STM32与陀螺仪如LSM6DS33进行通信,不仅能实现复杂的数据采集,还能够为系统提供精确的运动状态信息。
通信是STM32与陀螺仪之间互动的核心。通过I2C(Inter-Integrated Circuit)协议,STM32可以高效地与陀螺仪模块进行数据交换。这种通信方式不仅降低了硬件复杂度,还支持多设备在同一总线上操作,极大地优化了硬件资源的利用。接下来的章节将详细介绍如何配置STM32的I2C接口,并实现与LSM6DS33陀螺仪的通信。
2. STM32的I2C接口配置
2.1 I2C接口的基本概念
2.1.1 I2C通信协议简介
I2C(Inter-Integrated Circuit)是一种由Philips半导体(现为NXP半导体)在1980年代开发的多主机串行计算机总线。它被设计用来允许具有不同速率的多个“从机”设备通过两根线与诸如微控制器和处理器等“主机”设备通信。
I2C通信协议主要特点如下:
- 多主机能力 :总线上可以连接多个主机,但同一时间只能有一个主机来控制数据传输。
- 串行通信 :数据通过串行的方式,一位接一位地在总线上传输。
- 同步通信 :数据传输时钟由主机产生。
- 地址可寻址 :每个I2C设备都有一个独立的地址,使得主机可以识别并选择要通信的特定设备。
- 线与逻辑 :I2C总线是通过开漏极输出引脚和上拉电阻来实现线与逻辑。
- 共用线路 :一条数据线(SDA)和一条时钟线(SCL)供所有设备共用。
2.1.2 STM32中I2C的工作模式
在STM32微控制器中,I2C工作模式可以是主模式(Master)或从模式(Slave)。在主模式下,STM32微控制器生成时钟信号并启动数据传输;而在从模式下,它遵循另一个主设备的时钟信号并响应它的命令。
STM32的I2C工作模式主要包含:
- 主发送模式 :微控制器作为主机向从设备发送数据。
- 主接收模式 :微控制器作为主机从从设备接收数据。
- 从发送模式 :微控制器作为从设备响应主机的读请求。
- 从接收模式 :微控制器作为从设备响应主机的写请求。
2.2 STM32 I2C接口硬件连接
2.2.1 I2C总线的硬件连接方式
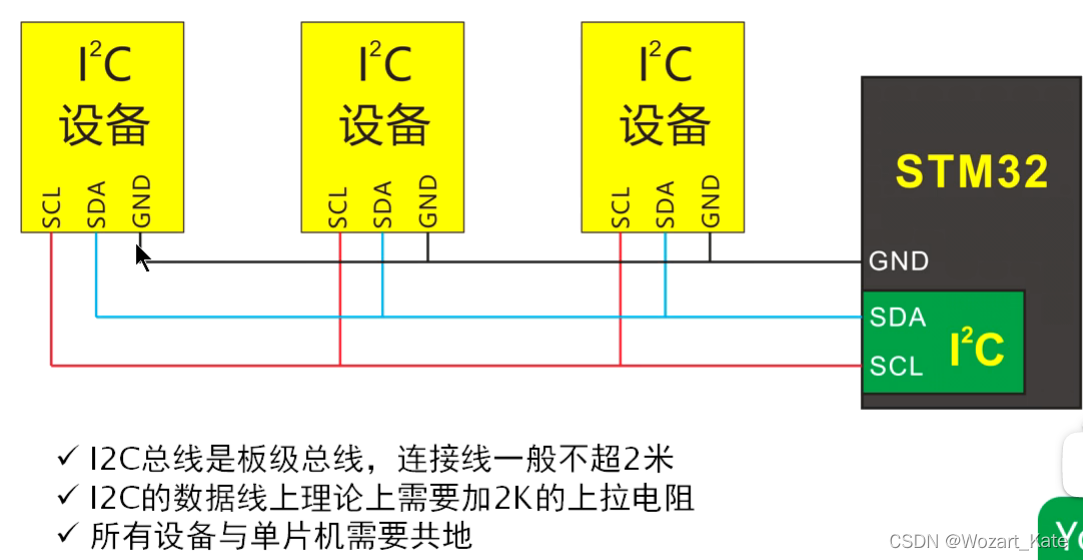
I2C总线连接非常简单,只需要两条线:串行数据线(SDA)和串行时钟线(SCL)。为了保证信号质量,这两条线需要连接上拉电阻。
硬件连接要点:
- 上拉电阻 :常用的上拉电阻值在4.7kΩ到10kΩ之间,用于保证总线电平在空闲时为高电平。
- 线材选择 :为了减少信号干扰,最好使用双绞线或带屏蔽的电缆。
- 连接器 :在某些应用中,可以使用带有内置上拉电阻的I2C连接器。
2.2.2 STM32引脚复用与配置
STM32微控制器在设计时,I2C接口的引脚是复用的,意味着同一个引脚可以用于不同的外设接口。为了使用I2C接口,需要对引脚进行复用配置。
引脚复用配置步骤:
1. 选择引脚 :通常在STM32CubeMX工具中或者直接在代码中选择I2C接口需要的GPIO引脚。
2. 设置引脚属性 :将所选引脚的模式设置为复用开漏模式。
3. 配置时钟 :为I2C接口启用时钟,通常是对RCC(Reset and Clock Control)模块的操作。
4. 配置I2C参数 :设置I2C的速率,地址模式等参数。
2.3 STM32 I2C接口软件配置
2.3.1 软件包的安装与初始化
要使用STM32的I2C接口,首先需要安装相应的软件包,这通常包括HAL库或LL库,以及可能的中间件。
安装步骤通常包括:
1. 创建项目 :使用STM32CubeIDE或其他IDE创建一个新项目。
2. 配置I2C :在STM32CubeMX中配置I2C接口参数,如时钟频率,地址模式等,并生成初始化代码。
3. 编写应用代码 :使用HAL库或LL库中的函数编写应用层代码,实现初始化,发送数据,接收数据等功能。
2.3.2 I2C参数设置与接口配置方法
配置I2C接口时,需要设置合适的时钟速率和地址模式,以满足通信要求。
主要参数设置包括:
- 时钟速率 :通常设置为标准模式(100 kHz)或快速模式(400 kHz)。
- 地址模式 :STM32支持7位和10位两种地址模式,需根据外部设备的要求进行设置。
使用HAL库的代码示例:
I2C_HandleTypeDef hi2c1;void SystemClock_Config(void);static void MX_GPIO_Init(void);static void MX_I2C1_Init(void);int main(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_I2C1_Init(); // I2C1 初始化代码省略}static void MX_I2C1_Init(void){ hi2c1.Instance = I2C1; hi2c1.Init.ClockSpeed = 100000; hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; hi2c1.Init.OwnAddress1 = 0; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c1.Init.OwnAddress2 = 0; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; if (HAL_I2C_Init(&hi2c1) != HAL_OK) { Error_Handler(); }}以上为STM32的I2C接口配置的基本知识和配置方法,为后续在STM32微控制器上与陀螺仪设备进行I2C通信奠定了坚实的基础。在理解了I2C接口的工作原理、硬件连接以及软件配置之后,我们可以开始进行陀螺仪设备LSM6DS33的具体配置工作。
3. 配置陀螺仪LSM6DS33的相关步骤
3.1 LSM6DS33陀螺仪概述
3.1.1 LSM6DS33的主要特性
LSM6DS33是一款高性能的惯性测量单元(IMU),集成了3轴加速度计和3轴陀螺仪传感器,可以提供精确的运动检测和方向感应。其主要特点包括:
- 宽范围的测量范围 :加速度计测量范围可以是±2g/±4g/±8g/±16g,陀螺仪测量范围是±125/±245/±500/±1000/±2000°/s。
- 低功耗模式 :能够通过软件配置不同的功耗模式来满足不同的应用需求。
- 数字输出 :通过I2C和SPI数字接口提供数据输出,方便与STM32微控制器通信。
- 内置温度传感器 :可以用于校准或环境监测。
3.1.2 LSM6DS33的应用领域
LSM6DS33的应用领域非常广泛,包括但不限于:
- 智能手机和平板电脑的运动跟踪。
- 游戏控制器的精确动作感应。
- GPS导航系统中的辅助定位。
- 物联网(IoT)设备,如可穿戴设备的运动状态监测。
- 工业自动化中的振动和移动检测。
3.2 LSM6DS33的寄存器映射
3.2.1 寄存器的配置与功能
LSM6DS33内部有多个寄存器,每个寄存器都有特定的功能。例如,加速度计和陀螺仪的数据寄存器用于存储传感器的测量结果,而控制寄存器则用于设置传感器的工作模式和参数。
| 寄存器地址 | 描述 | 初始值 | 可写 ||------------|--------------------|--------|------|| 0x01 | WHO_AM_I | 0x69 | R || 0x10 | CTRL1_XL | 0x00 | RW || 0x11 | CTRL2_G | 0x00 | RW || ... | ... | ... | ... || 0x28-0x2D | OUTX_L_G至OUTZ_H_G | 0x00 | R |3.2.2 如何选择合适的寄存器进行配置
在配置LSM6DS33时,关键是要选择正确的寄存器以及相应的位进行设置。例如,如果您想要设置加速度计的测量范围,那么您需要修改 CTRL1_XL 寄存器中相应的位。
uint8_t reg_val = 0x00; // 初始化寄存器值HAL_I2C_Mem_Read(&hi2c1, LSM6DS33_I2C_ADDRESS, CTRL1_XL, 1, ®_val, 1, 1000); // 读取当前寄存器值reg_val = (reg_val & 0xFC) | (ACCEL_RANGE_4G << 2); // 设置加速度计范围为±4gHAL_I2C_Mem_Write(&hi2c1, LSM6DS33_I2C_ADDRESS, CTRL1_XL, 1, ®_val, 1, 1000); // 写入新值3.3 LSM6DS33的初始化配置
3.3.1 上电与复位步骤
初始化LSM6DS33的第一步通常是上电和复位。上电操作是通过将 CTRL3_C 寄存器中的 SWRESET 位设置为1来完成的。
uint8_t reg_val = 0x00; // 初始化寄存器值reg_val = (1 << 7); // 设置SWRESET位HAL_I2C_Mem_Write(&hi2c1, LSM6DS33_I2C_ADDRESS, CTRL3_C, 1, ®_val, 1, 1000); // 复位LSM6DS333.3.2 功能模块的激活与配置
功能模块的激活是通过设置相应的控制寄存器来实现的。例如,激活加速度计和陀螺仪模块,并设置它们的工作模式和输出数据率。
// 激活加速度计并设置ODR为1.66kHzuint8_t reg_val = (ACCEL_RATE_1_66_KHZ << 4) | (1 << 3);HAL_I2C_Mem_Write(&hi2c1, LSM6DS33_I2C_ADDRESS, CTRL1_XL, 1, ®_val, 1, 1000);// 激活陀螺仪并设置ODR为1.66kHzreg_val = (GYRO_RATE_1_66_KHZ << 4) | (1 << 3);HAL_I2C_Mem_Write(&hi2c1, LSM6DS33_I2C_ADDRESS, CTRL2_G, 1, ®_val, 1, 1000);以上就是配置LSM6DS33陀螺仪的详细步骤。通过设置和激活不同的寄存器,我们可以使LSM6DS33按照我们的需求工作,进而为各种应用场景提供精确的运动数据。
4. 陀螺仪设备地址设置与数据寄存器读取
4.1 陀螺仪的I2C地址配置
4.1.1 地址选择与配置要点
I2C地址设置是确保STM32与陀螺仪通信成功的关键步骤。LSM6DS33陀螺仪支持多地址模式,根据其硬件设计,可以有多个I2C地址。配置要点涉及理解硬件地址引脚的逻辑电平状态,以及根据设备的说明书来设定相应的软件地址。
通常,LSM6DS33的I2C地址可由一个硬件引脚决定,比如SA0引脚。如果SA0引脚连接到地(GND),则设备的I2C地址为0b1101000,反之如果SA0连接到高电平,则地址为0b1101001。软件配置时,需要根据硬件设置来选择正确的I2C设备地址。
4.1.2 物理地址与软件地址的区别
在I2C通信中,物理地址是指设备的硬件编码,而软件地址是通过STM32的I2C库函数设置的访问地址。软件地址必须与硬件地址相对应,才能确保STM32能正确地与陀螺仪通信。
软件地址设置通常在初始化STM32的I2C接口时完成。例如,在HAL库中,可以使用 HAL_I2C_Mem_Write 或 HAL_I2C_Mem_Read 函数来指定设备地址和内存地址进行通信。
4.2 陀螺仪数据寄存器读取操作
4.2.1 数据寄存器的分类和用途
LSM6DS33陀螺仪拥有多个寄存器用于存储不同功能的数据,例如加速度计数据寄存器、陀螺仪数据寄存器、温度数据寄存器等。这些寄存器需要根据具体的应用场景选择性地读取。
例如,加速度计数据寄存器包含X、Y、Z三个轴的加速度信息,而陀螺仪数据寄存器包含三个轴的角速度信息。根据应用需求,可能还需要读取控制寄存器来调整传感器的配置。
4.2.2 如何通过I2C读取数据寄存器
通过STM32的I2C接口读取LSM6DS33数据寄存器的步骤通常如下:
- 初始化I2C接口,并配置为I2C主设备模式。
- 设置LSM6DS33的I2C地址。
- 向LSM6DS33发送读取请求,指定数据寄存器的地址。
- 接收数据寄存器返回的数据。
以下是一个简化的代码示例,展示如何使用STM32 HAL库函数读取LSM6DS33的加速度计数据寄存器:
// 假设I2C句柄为 hi2c1uint8_t AccelData[6]; // 存储加速度计X、Y、Z轴的数据uint8_t DataAddress = 0x80 | 0x28; // 加速度计数据寄存器的地址(0x28为基地址,0x80为读操作的位)// 向LSM6DS33写入数据寄存器地址HAL_I2C_Mem_Write(hi2c1, LSM6DS33_ADDR, DataAddress, I2C_MEMADD_SIZE_8BIT, NULL, 0, 1000);// 从LSM6DS33读取数据寄存器中的加速度计数据HAL_I2C_Mem_Read(hi2c1, LSM6DS33_ADDR, DataAddress | 0x01, I2C_MEMADD_SIZE_8BIT, AccelData, 6, 1000); 在这段代码中, LSM6DS33_ADDR 是LSM6DS33的I2C地址, DataAddress 是加速度计数据寄存器的地址,其中0x80用于指示进行读操作。
4.3 陀螺仪数据处理与分析
4.3.1 数据格式的转换与解析
从陀螺仪读取的数据通常为原始格式,需要转换为可读的物理量。例如,加速度计的原始数据需要根据其分辨率(通常是每LSB代表的g值)和全量程范围转换为g(重力加速度单位)。
解析加速度计数据的例子代码如下:
int16_t AccelRaw[3];float Accel[3] = {0.0};uint8_t AccelRawData[6]; // 存储原始加速度数据// 假设已从传感器读取6字节数据到AccelRawData数组for (int i = 0; i < 3; i++) { AccelRaw[i] = (int16_t)(AccelRawData[2*i] << 8 | AccelRawData[2*i + 1]);}// 假设加速度计的全量程为±4g,分辨率是0.061mg/LSBfor (int i = 0; i < 3; i++) { Accel[i] = AccelRaw[i] * 0.061 / 1000.0;}4.3.2 数据的实时监测与分析技巧
实时监测和分析LSM6DS33的数据通常需要在主循环中周期性地读取数据,并更新相应的变量。为了获取平滑的数据输出,可能需要使用滤波算法(如卡尔曼滤波、互补滤波)来减少噪声。
此外,可以使用图表展示实时数据,或者通过阈值判断和状态机来实现更复杂的功能,比如运动检测、姿态估计算法等。
graph LR A[初始化传感器] --> B[设置采样率] B --> C[主循环] C --> D[读取数据] D --> E[数据滤波] E --> F[数据转换] F --> G[状态机判断] G --> H[输出结果] H --> I[延时] I --> C在上述流程图中,展示了从初始化传感器开始,设置采样率,然后进入主循环。在主循环中,通过周期性地读取传感器数据,然后进行数据滤波和转换,并通过状态机进行运动或姿态判断,最后输出处理结果,并适当延时以匹配设定的采样率。
通过以上步骤和分析,STM32可以有效地从LSM6DS33获取陀螺仪数据,并进行实时监测与分析。
5. STM32与LSM6DS33通信的程序编写步骤
在本章节中,我们将深入探讨如何编写STM32与LSM6DS33陀螺仪进行通信的程序。这包括了准备工作、程序框架的构建、数据交互程序的实现以及异常处理和数据校验的步骤。
5.1 程序编写前的准备工作
为了编写STM32与LSM6DS33通信的程序,我们需要做一系列准备工作,包括开发环境的搭建、库文件的准备以及明确编程规范与风格。
5.1.1 环境搭建与库文件准备
首先,确保你已经安装了适合STM32开发的集成开发环境(IDE),如Keil uVision、STM32CubeIDE等。接下来,安装必要的驱动程序和库文件。对于STM32的HAL库或LL库,需要下载对应的库文件,并在你的IDE中配置它们。
例如,使用STM32CubeIDE时,可以通过STM32CubeMX工具生成初始化代码和库文件。选择相应的MCU型号,配置I2C接口参数,并生成项目代码。
/* STM32CubeMX生成的I2C初始化代码示例 *//* 在此代码中,MX_I2C1_Init函数初始化了I2C1接口 */void MX_I2C1_Init(void){ hi2c1.Instance = I2C1; hi2c1.Init.ClockSpeed = 400000; hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; hi2c1.Init.OwnAddress1 = 0; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c1.Init.OwnAddress2 = 0; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; HAL_I2C_Init(&hi2c1);}5.1.2 编程规范与风格指导
编程规范确保代码的可读性和可维护性。在编写STM32与LSM6DS33通信程序时,需要遵循一些通用的编程原则:
- 命名规范 :变量和函数命名要清晰明了,使用驼峰命名法或下划线分隔命名法。
- 注释习惯 :对关键的代码段和复杂逻辑进行详细注释,确保团队成员易于理解。
- 代码格式化 :保持一致的代码缩进和大括号风格,提高代码整洁性。
5.2 编写通信协议的程序框架
编写程序前,需要构建主程序结构,并实现通信协议的基本要点。
5.2.1 主程序结构设计
主程序通常包括初始化系统、主循环和中断服务程序。初始化系统包括配置时钟、I2C接口、GPIO和中断。主循环中则包括了读取陀螺仪数据和进行数据处理的逻辑。中断服务程序用于响应某些事件,例如定时器中断或外部中断。
int main(void){ /* 系统初始化 */ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_I2C1_Init(); /* 主循环 */ while (1) { /* 读取陀螺仪数据 */ if(HAL_I2C_Mem_Read(&hi2c1, LSM6DS33_ADDR, WHO_AM_I_REG, I2C_MEMADD_SIZE_8BIT, (uint8_t*)&who_am_i, 1, 1000) == HAL_OK) { /* 处理读取到的数据 */ } /* 其他需要周期性执行的代码 */ }}/* 系统时钟配置函数 */void SystemClock_Config(void){ /* 配置系统时钟代码 */}/* GPIO初始化函数 */void MX_GPIO_Init(void){ /* 配置GPIO代码 */}/* 其他初始化函数 */5.2.2 通信协议实现的要点
通信协议的实现要点在于定义一套清晰的协议规范。这包括如何发送和接收数据、如何处理错误和超时情况等。协议应能处理连续数据的读取,以及数据的同步和完整性验证。
5.3 实现数据交互的程序流程
在完成程序框架搭建后,接下来需要实现数据交互的具体程序流程。
5.3.1 发送与接收数据的步骤
在STM32中,通过I2C接口发送和接收数据通常涉及HAL库提供的API。下面的示例展示了如何发送数据到LSM6DS33的控制寄存器,并读取其数据寄存器的内容。
/* 发送数据到陀螺仪 */uint8_t reg = CTRL_REG1_ADDR; // 控制寄存器地址uint8_t data = 0b00001111; // 写入的控制字节if(HAL_I2C_Mem_Write(&hi2c1, LSM6DS33_ADDR, reg, I2C_MEMADD_SIZE_8BIT, &data, 1, 1000) != HAL_OK){ /* 错误处理 */}/* 从陀螺仪读取数据 */uint8_t buffer[6]; // 用于存储6个字节的数据if(HAL_I2C_Mem_Read(&hi2c1, LSM6DS33_ADDR, OUTX_L_REG, I2C_MEMADD_SIZE_8BIT, buffer, 6, 1000) != HAL_OK){ /* 错误处理 */}/* buffer数组现在包含了从陀螺仪读取到的X轴、Y轴和Z轴的数据 */5.3.2 异常处理与数据校验
异常处理和数据校验是确保数据通信可靠性的重要环节。需要对I2C通信过程中可能出现的错误进行捕获和处理,例如通信超时、数据完整性检查、奇偶校验等。
/* 通用错误处理函数 */void error_handler(void){ /* 根据不同的HAL库错误代码执行相应错误处理 */ switch(HAL_GetError()) { case HAL_ERROR: /* 处理通用错误 */ break; case HAL_TIMEOUT: /* 处理超时错误 */ break; default: break; }}在实际应用中,异常处理函数应根据程序需求进行设计和扩展。此外,确保数据校验逻辑能够发现和纠正潜在的数据错误,从而保证最终数据的准确性。
以上章节内容,细致地阐述了在编写STM32与LSM6DS33通信程序时,需要遵循的步骤和实践要点。通过这一系列的准备和实现,可以有效地完成微控制器与陀螺仪之间的通信任务。
6. 示例代码和测试程序的介绍
6.1 样例程序的结构与功能
在这一章节,我们将重点介绍一个样例程序的结构和它的关键功能。这个样例程序将涉及如何使用STM32微控制器通过I2C接口与LSM6DS33陀螺仪进行通信。
6.1.1 样例程序的代码组织
样例程序的代码组织遵循了模块化设计原则,保证代码易于理解和维护。具体模块化设计如下:
- 初始化模块 :负责系统时钟配置、I2C接口初始化和陀螺仪 LSM6DS33的初始化。
- 主控制模块 :负责程序的主要流程控制,如启动测量、读取数据、处理数据和执行相应的功能。
- 数据处理模块 :将从陀螺仪读取的原始数据转换为可理解的物理量(如角度、角速度等)。
- 通信协议模块 :封装了与陀螺仪通信的具体协议细节,包括数据格式的定义、读写函数等。
- 错误处理模块 :负责监控通信错误和数据异常,执行相应的错误处理程序。
代码样例:
// 初始化I2C接口void I2C_Init() { // 初始化I2C接口相关的GPIO端口 // 设置I2C速率和模式 // 启用I2C接口}// 初始化陀螺仪 LSM6DS33void Gyro_Init() { // 设置工作模式和采样速率 // 配置数据输出格式和读取方式}int main(void) { // 系统初始化 System_Init(); // 初始化I2C接口 I2C_Init(); // 初始化陀螺仪 Gyro_Init(); while(1) { // 持续读取陀螺仪数据 // 处理和显示数据 }}6.1.2 样例程序中关键功能的实现
关键功能包括:数据读取、数据处理和I2C通信。下面是数据读取的一个简单实现示例:
uint8_t Read_Gyro_Data(uint8_t reg_addr) { uint8_t data; // 启动I2C通信并发送寄存器地址 I2C_Start(); I2C_Send_Byte(LSM6DS33_I2C_ADDR | I2C_WRITE); I2C_Send_Byte(reg_addr); I2C_Stop(); // 重新启动I2C通信并读取数据 I2C_Start(); I2C_Send_Byte(LSM6DS33_I2C_ADDR | I2C_READ); data = I2C_Read_Byte(NACK_LAST_BYTE); I2C_Stop(); return data;}6.2 测试程序的设计与执行
为了验证样例程序的正确性和功能完整性,设计测试程序是必不可少的步骤。
6.2.1 测试用例的设计原则
- 全面性 :测试用例应覆盖所有功能模块的边界条件和典型场景。
- 独立性 :每个测试用例应独立执行,不依赖其他用例的执行结果。
- 可重复性 :每次执行测试用例应得到相同或预期的结果。
- 简洁性 :测试步骤应尽可能简单,易于理解和操作。
6.2.2 测试结果的验证方法
测试结果的验证可以通过以下方法进行:
- 日志输出 :将测试过程中关键步骤的输出打印到日志中,便于分析问题。
- 结果比对 :将测试结果与预期结果进行比对,确认程序的正确性。
- 手动检查 :对于一些关键数据,可以手动检查I2C总线数据确保正确性。
6.3 程序调试与优化技巧
程序调试和性能优化是确保软件质量和运行效率的重要步骤。
6.3.1 常见调试工具与方法
- 串口打印调试 :通过串口输出程序运行过程中的变量值和状态信息。
- IDE调试器 :使用集成开发环境提供的调试工具,如断点、单步执行等。
- 逻辑分析仪 :使用硬件逻辑分析仪来监控I2C总线上的数据传输。
6.3.2 程序性能优化的方向与实践
- 代码优化 :重构低效的算法和逻辑,减少不必要的计算和内存操作。
- I2C通信优化 :合理配置I2C速率和时序,减少通信延迟和数据包大小。
- 数据分析优化 :针对数据处理流程进行优化,比如使用DMA进行数据搬运,减少CPU负担。
程序性能优化是一个持续的过程,需要根据具体应用场景和硬件性能进行针对性的调整和优化。
本文还有配套的精品资源,点击获取
简介:STM32微控制器通过I2C与陀螺仪通信是嵌入式系统中实现传感器数据获取的常用方式。本文介绍了如何通过STM32的I2C接口与LSM6DS33陀螺仪进行数据交互,包括I2C接口配置、陀螺仪配置寄存器设置、读写操作和数据解析等关键步骤。并提供了一个可能包含示例代码的“LSM6DS33测试”压缩包,以帮助开发者深入理解并掌握STM32与陀螺仪之间的I2C通信。
本文还有配套的精品资源,点击获取


