数学建模——模拟退火算法(SA)_模拟退火 数学建模
1.概念
模拟退火算法(Simulated Annealing, SA)是一种基于蒙特卡洛思想的全局优化算法,灵感来源于固体退火过程。该算法通过模拟高温物体逐渐冷却的过程,在解空间中随机搜索最优解,具有跳出局部最优的能力。
模拟退火的核心思想源于热力学中的退火过程:高温下粒子能量高,状态随机性强;随着温度降低,系统逐渐趋于稳定。
举个例子,比如你要从高空往山底飞,一开始高空全是雾,你不知道最低点在哪里,你可以到处飞,随着高度下降,你所看到的区域最低点越来越清楚,而其他地方的最低点越来越难看到,最后你能完全看到你所在区域的最低点,从而找到一个相对理想的最低点
&&模拟退火相较于蒙特卡罗法就在于模拟退火不是完全随机
比如现在把一个登山者随机放在山里面的任何一个位置,要求登山者找到最高峰,蒙特卡罗法是生成大量的位置,找所有位置里面的最高点。而模拟退火是有规则的,下一个位置要是比一开始的位置低那只能有概率接受,而概率也和退火时间(温度)相关
&&模拟退火相较于爬山法就在于模拟退火不是完全遵循规则
爬山法中爬山的人只能向上爬,爬到局部最优时周围的点当然更低,全都不接受,然后就会卡在局部最优
2.算法流程
模拟退火有两层循环
其中外层循环主要是用来降温,内层循环用来选择解
1.伪代码如下:
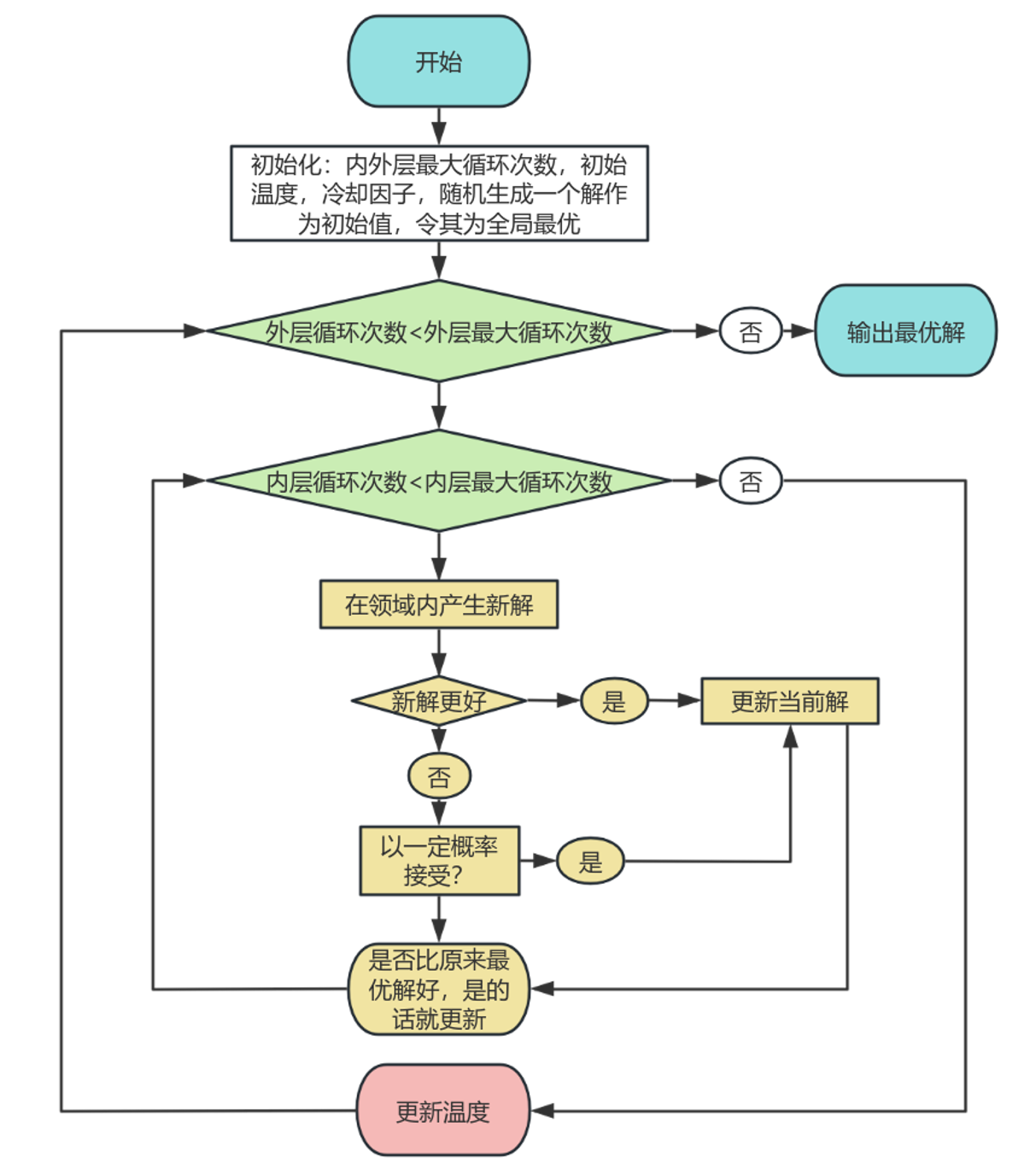
# 初始化x ← x₀ # 当前解best ← x # 历史最优T ← T₀k ← 0while T > T_min and k < max_iter: for i = 1 .. L_k: # 每个温度的内部循环 y ← Neighbor(x) # 产生邻域解 ΔE ← E(y) - E(x) if ΔE < 0: # 更好解 → 直接接受 x ← y if E(y) < E(best): best ← y else: # 更差解 → 按概率接受 if rand() < exp(-ΔE / T): x ← y T ← α * T # 降温 k ← k + 1 (可选) L_k ← UpdateLength(T) # 动态调整链长return best2.流程图
3.细节
当然这里面有细节没说清楚
1.以一定概率接受,一定概率是多少?
这就是著名的 Metropolis 接受概率:

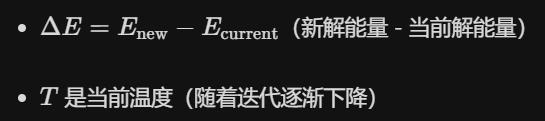
其中
![]() 这个函数其实是一个单调递减的函数,接受概率与
这个函数其实是一个单调递减的函数,接受概率与![]() 成负相关,也就是说接受概率与差值是负相关,与温度是正相关
成负相关,也就是说接受概率与差值是负相关,与温度是正相关
当差值越大时,接受概率就会比较低,意思是新旧值之间离的近才容易接受
对于温度,退火的过程中温度是逐渐降低的,而温度越低接受度越低,也就是说越到后面越不接受不理想值而一开始T是100,让![]() 几乎为0,接受度几乎是100%,意思就是一开始允许乱选点,即使是不好的点也允许选,为什么?因为这样可以保证选的范围尽可能大,这样容易找到最优解所在的区间
几乎为0,接受度几乎是100%,意思就是一开始允许乱选点,即使是不好的点也允许选,为什么?因为这样可以保证选的范围尽可能大,这样容易找到最优解所在的区间
2.模拟退火中要在附近找一个新解,附近怎么定义,新解怎么算
“附近”就是邻域(neighborhood)的定义,它是模拟退火算法里问题相关、算法无关的部分。
只要满足一条:从当前解 x 出发,用若干“简单变换”能一步到达的全体解的集合 N(x)。
如何“算”新解,完全取决于你用什么变换规则。
函数优化
delta = (UpperBound - LowerBound); % 变量范围sigma = T .* delta; % 温度越高,sigma 越大x_new = x + sigma .* randn(size(x)); % 高斯扰动x_new = max(min(x_new, UpperBound), LowerBound); % 裁剪到边界方法2:
y=randn(1,narvs);%生成一行narvs列的N(0,1)随机数 z=y/sqrt(sum(y.^2)); x_new=x0+z*T; for j=1:narvs if x_new(j)x_max(j) r=rand(1); x_new(j)=r*x_max(j)+(1-r)*x0(j); end end小细节
1.如果你看的仔细,可能会发现这个x_new很容易越界
下面给两种方式处理
1.强行截断取上下界
x_new = max(min(x_new, UpperBound), LowerBound); % 裁剪到边界这个方法很容易出现温度较高时在最大最小值之间跳动,导致计算多余
解决方法是找到合适的初始温度,如果温度较低就提高降温系数
2.找一个初始的x,假如新x越下界,就在下界和x中随机选一个数,越过上界同理
for j=1:narvs if x_new(j)x_max(j) r=rand(1); x_new(j)=r*x_max(j)+(1-r)*x0(j); end end2.模拟退火的核心
为什么早期“大步”也算邻域?
模拟退火里的 neighborhood 定义 并不是“几何距离很小的点”,而是
“在当前温度下,算法愿意尝试的点”。
早期高温时,系统允许大幅度跳跃,因为接受度很大,因此 整个定义域 都被视为潜在邻域,这样保证不会陷入局部最优;随着温度降低,邻域概念才真正缩回到“局部”,因为接受度越来越小。
3.疑惑
1.为什么模拟退火算法最后一定会是一个相对最优解
模拟退火算法(Simulated Annealing, SA)最终不保证找到全局最优解,但它大概率会收敛到一个“相对最优解”(即接近全局最优的局部最优)。其核心逻辑依赖于概率性接受劣解和退火温度的衰减,具体原因如下:
1. 概率性跳出局部最优
-
Metropolis准则:算法以一定概率 e−ΔE/T 接受劣解(ΔE>0),其中 T 是温度。在高温阶段,接受概率高,允许探索更差的解;随着 T 降低,接受概率趋近于0,逐渐收敛到局部区域。
-
关键作用:这种机制使算法在早期阶段能跳出浅层局部最优,后期则稳定在当前区域,避免无休止的随机游走。
2. 温度衰减的平衡
-
退火计划:温度按 Tk+1=αTk(0<α<1)衰减,若衰减足够慢(如 α≈0.99),算法会经历“充分探索→局部精炼”的过程。
-
理论保证:若采用对数衰减 Tk=ln(k+1)C,理论上可收敛到全局最优(但计算成本极高,实际中不可行)。实际应用中,指数衰减更常见,此时只能保证“相对最优”。
类比解释
想象一个凹凸不平的球面:
-
高温阶段:球(当前解)被剧烈摇晃,可能翻越任何障碍(跳出局部最优)。
-
低温阶段:摇晃减弱,球最终停在一个较深的谷底(局部最优),但不一定是全局最深的谷底。
2.有没有可能收敛到另一个局部最优
最后不一定是整体最优,甚至连“相对最优”都不保证——它只是一个随机过程,最终停在哪个局部最优完全取决于:
-
退火速度(降温调度)
降温太快,系统可能“过早冻结”在某个局部最优,连附近更好的解都没机会探索。 -
随机路径(蒙特卡洛抽样)
即使退火速度合适,如果随机抽样“运气不好”,始终没碰到通往全局最优的路径,也会卡在另一个局部最优。 -
问题本身的能量景观
如果全局最优被“高能量壁垒”包围,而算法没在高温阶段跨越过去,最终就进不去那个“盆地”。
3.那为什么还要选择模拟退火算法
因为它在“够快”和“够好”之间,提供了一个工程上最划算的折中方案。
下面分场景给出更具体的理由:
-
问题本身太“丑”
-
非凸、非光滑、维度高、组合爆炸(如 TSP、VLSI 布局、超参调优)。
-
传统梯度法/整数规划/动态规划要么根本用不了,要么算到天荒地老。
➔ SA 只需一个“能量函数”即可开跑,写 20 行代码就能得到一个“还不错的可行解”。
-
-
要求“随时可用、随时可停”
-
实际项目经常有时间/预算上限(例如 10 分钟、1000 次能量评估)。
-
SA 天然支持“任何时刻中断并取当前最佳解”,而很多精确算法必须跑完才有结果。
-
-
实现成本极低,通用性强
-
与问题领域无关:只要你能定义“解”和“能量/代价”,就能套模板。
-
对比遗传算法、粒子群、蚁群等,SA 参数少(主要是温度调度),调试门槛低。
-
4.为什么降低温度足够慢也会收敛到全局最优,选点不是随机的吗
最高点左右往上爬的机会更多,比如我在最高点附近,我选择附近的点,还是能继续往上爬的,这个是容易接受的,而不是最高点,就算能往上爬一段,也会在中途找不到更高的点,即使能接受一部分低点作为新x,但是总有跳走的时候
4.运行结果
完整20000次
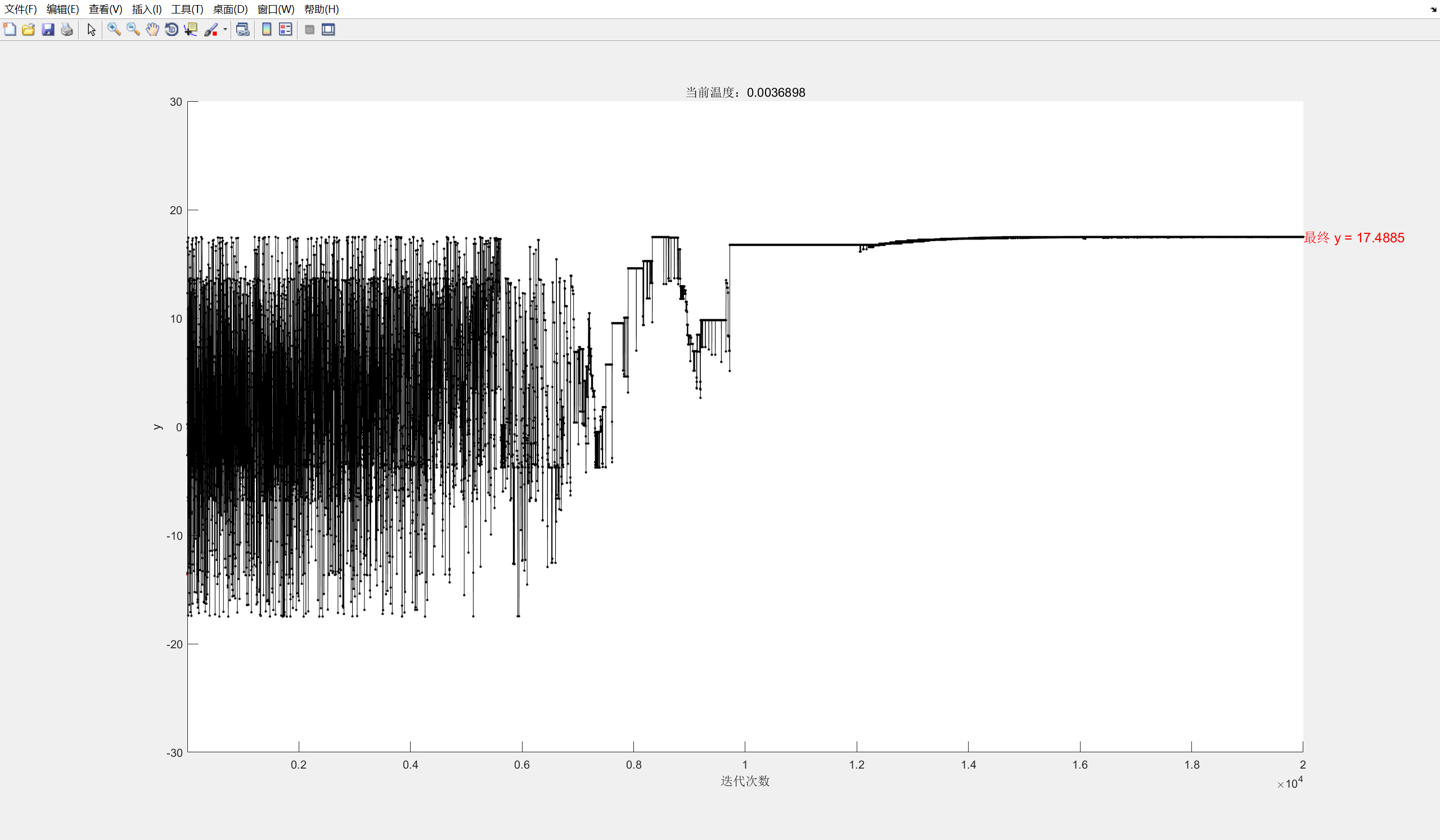
只看外层200次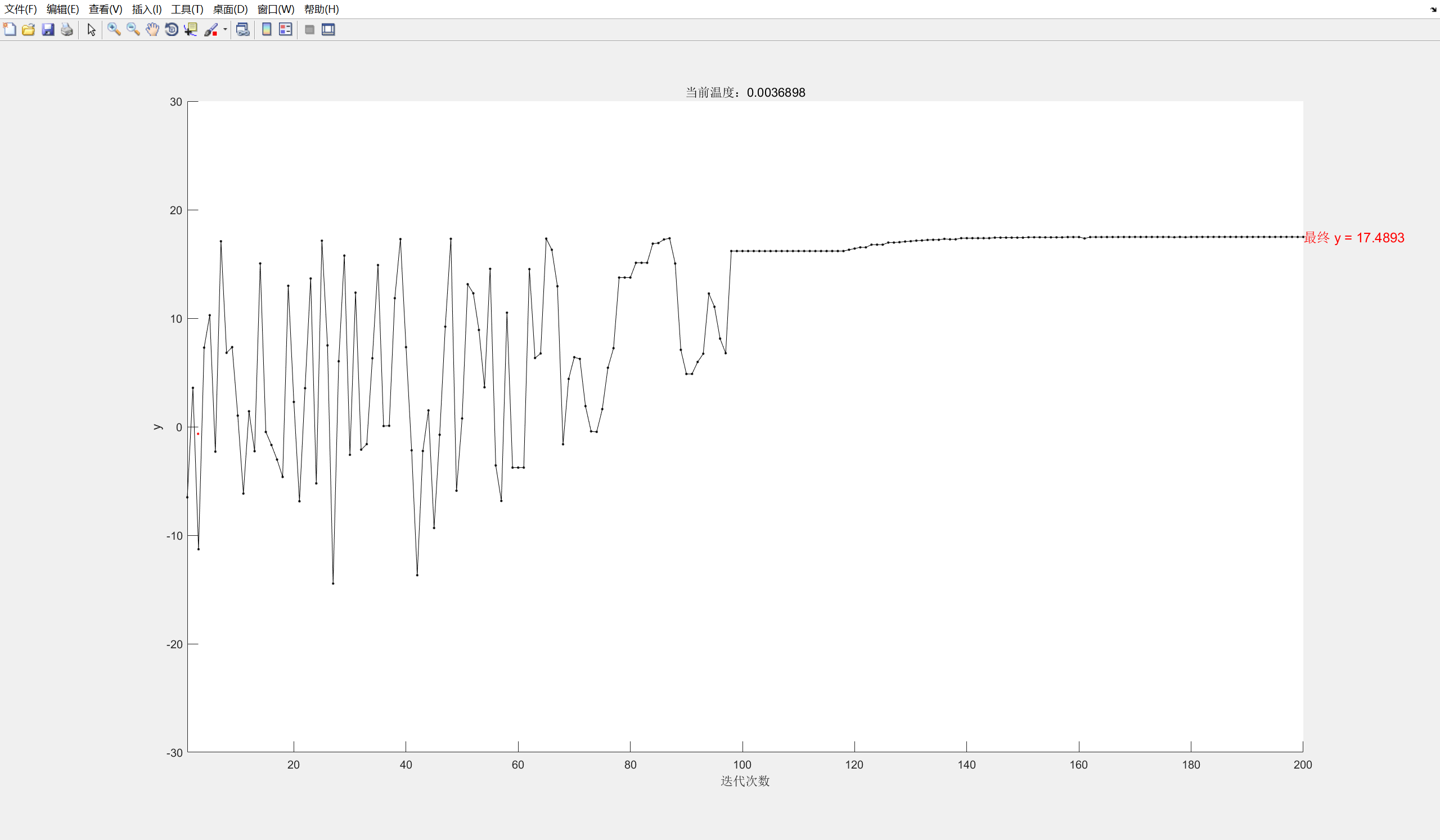
从这个图我们可以看到,有的时候都找到最大值了,但是由于运气问题会跳到非最大值,不过由于次数足够大,最终还是会找到一个比较好的结果

