什么是 PX4?无人机开发的第一步_px4飞控是什么
本文是《从零开始学 PX4:无人机开发全流程实战》系列第一篇,带你迈出无人机飞控开发的第一步。适合零基础、有嵌入式/C++背景的开发者。
✈️ 一、PX4 是什么?
PX4 是一套开源的飞控系统(Flight Control System),适用于多种类型的无人机与机器人。它不仅仅是一个固件,而是一个完整的无人系统开发生态,包括飞控软件、仿真平台、通信协议、地面站和开发工具链。
📌 PX4 的组成:
-
✅ PX4-Autopilot:飞控固件主仓库(C++ 开发)
-
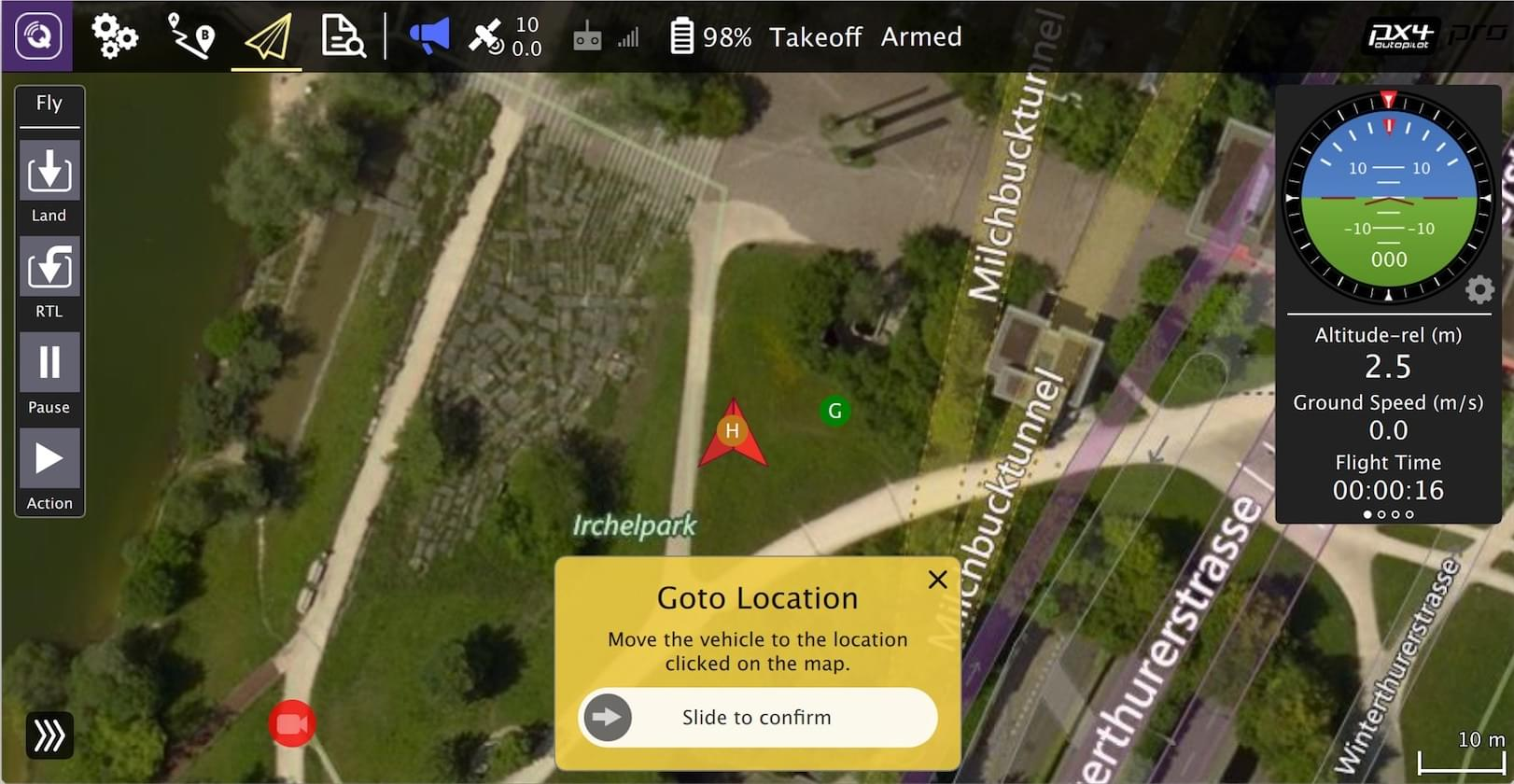
✅ QGroundControl:图形化地面站,便于调参与监控
-
✅ MAVLink:轻量级通信协议
-
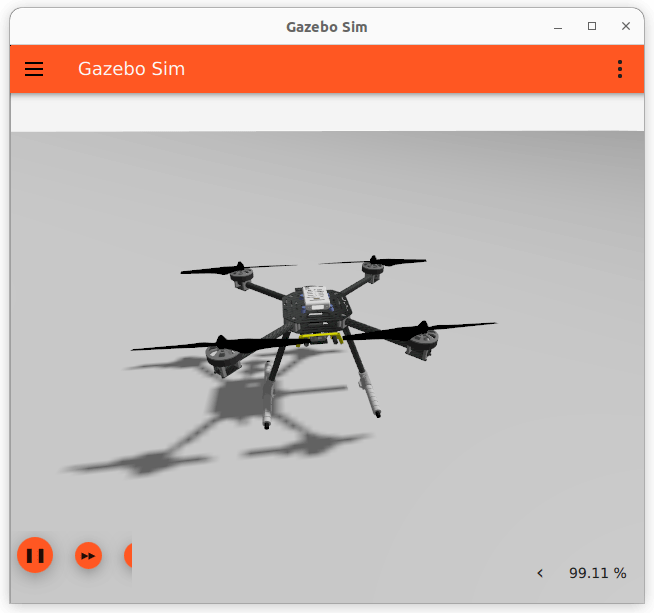
✅ Gazebo / jMAVSim:仿真模拟器
-
✅ MAVSDK / MAVROS:无人机接口(支持 Python / C++ / ROS)
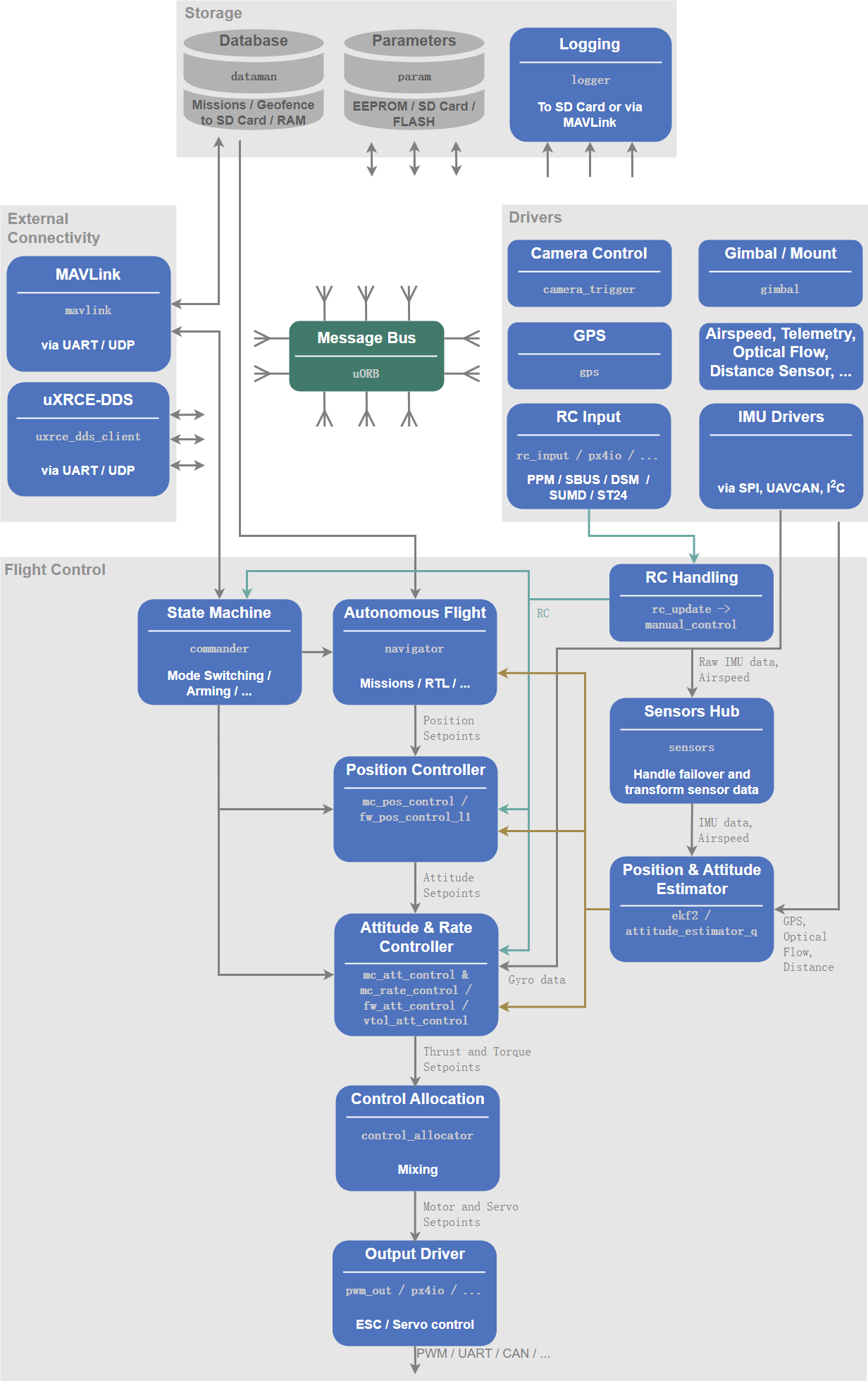
顶层软件架构
下面的架构图对 PX4 的各个积木模块以及各模块之间的联系进行了一个详细的概述。 图的上半部分包括了中间件模块,而下半部分展示的则是飞行控制栈的组件。
🧠 二、PX4 能做什么?
PX4 不只是“让无人机飞起来”,它支持多种控制任务,包括自动起降、路径规划、避障、返航、GPS 跟踪等。
🆚 三、PX4 vs ArduPilot 区别
两者都是开源飞控,但 PX4 更偏向现代架构与科研开发,而 ArduPilot 更成熟,广泛用于商用系统。
🧩 四、PX4 架构全景图
PX4 拥有模块化、层次化的系统架构。核心通信机制是 uORB(一种发布/订阅系统),实现了模块间解耦。
[QGroundControl] ⇄ MAVLink ⇄ [PX4-Autopilot] ↑ ↓ MAVSDK / MAVROS 飞控模块(Commander / Navigator) ↓传感器驱动 / 电机控制📌 核心模块包括:
-
Commander:飞行模式状态机
-
Navigator:航线导航逻辑
-
Firmware:飞控主循环逻辑
-
WorkQueue:任务调度线程池
🎯 五、谁应该学习 PX4?
PX4 是开源、免费、现代化的飞控平台,非常适合以下人群:
🧰 六、入门准备清单
🔜 下一篇预告
下一篇我们将带你进入实战部分:
🛠️如何从零开始搭建 PX4 开发与仿真环境(Ubuntu 22.04)
👉 包括工具安装、PX4 编译、Gazebo 仿真运行、常见报错解决。


