从零到精通:嵌入式智能循迹小车终极指南(STM32+PID算法+源码详解)
引言:开启你的嵌入式实战之旅
对于每一位渴望踏入嵌入式系统或机器人领域的学习者而言,理论知识的海洋固然广阔,但一次成功的项目实践,才是点燃技术热情的火花,是构建知识体系的坚实龙骨。智能循迹小车,正是这样一个经典、全面且极具启发性的项目。
本文旨在为对嵌入式开发、机器人技术感兴趣的初学者、在校学生及希望夯实基础的工程师,提供一份终极指南。它不仅仅是一份教程,更是一套系统性的方法论。通过这个项目,你将亲手将冰冷的元器件和抽象的代码,转化为一个能够在赛道上自主驰骋的智能体。我们将一起探索:
- 核心工作原理:从物理层面理解传感器如何感知路径。
- 硬件选型与搭建:学会像工程师一样思考,为项目选择最合适的组件。
- 软件算法进阶:从最简单的逻辑判断,一步步迈向工业控制领域的核心——PID算法。
- 实战调试与优化:掌握解决实际问题的方法,让你的小车从“能动”变为“精通”。
成果展示: 想象一下,你亲手打造的小车(如下图所示),在复杂的S型弯道和直角弯上,如丝般顺滑地行驶,没有丝毫的停顿与挣扎。这正是我们通过本文要实现的目标,它不仅是技术的体现,更是你学习成果的最佳证明。

一个典型的基于STM32的智能循迹与避障小车 (来源: CSDN博客)
核心原理剖析:小车如何“看”懂并“走”上黑线?
要让小车实现循迹,本质上是构建一个闭环反馈控制系统。这个系统可以被拆解为三个核心环节:感知(Sensing)、决策(Decision)和执行(Execution)。它们协同工作,使小车能够持续地发现偏差、计算对策并修正路线。
感知层 - 小车的“眼睛”
小车的“眼睛”是循迹传感器,最常用的是红外对管传感器,如TCRT5000。其工作原理非常直观:
- 发射与接收:传感器包含一个红外发射二极管和一个红外接收三极管。发射管不断向地面发射人眼看不见的红外光。
- 反射率差异:当红外光照射到不同颜色的表面时,反射率截然不同。白色表面(赛道背景)能反射绝大部分红外光,而黑色表面(循迹线)则会吸收绝大部分。
- 信号转换:接收管根据接收到的红外光强度,其导通状态会发生改变。在白色表面,接收到强反射光,导通,输出低电平;在黑色表面,几乎接收不到反射光,截止,输出高电平。这样,物理世界的光线差异就转化为了单片机可以读取的0和1数字信号。
多路传感器的意义: 仅用一个传感器,小车只能知道自己“在”或“不在”黑线上,无法判断偏离的方向和程度。因此,我们通常使用传感器阵列(如常见的五路模块)。
关键洞察: 多路传感器将一个二元问题(在/不在)升级为一个量化问题(偏离了多少)。例如,五路传感器读数为
00100表示小车完美居中;01100表示车身稍微偏右;11000则表示车身严重偏左。这个量化的“误差”信息,是实现高级控制算法(如PID)的基石。
决策层 - 小车的“大脑”
小车的“大脑”是微控制器(MCU),在本项目中我们选用强大的 STM32。它的任务是:
- 读取数据:从传感器阵列的各个GPIO口读取高低电平状态。
- 分析决策:根据预设的算法(无论是简单的if-else还是复杂的PID),处理传感器数据,计算出当前小车需要执行的动作。
- 发出指令:向电机驱动模块发送控制信号(PWM信号和方向信号),命令电机如何转动。
整个系统的控制流程形成了一个清晰的信号流:
传感器阵列 → (数字信号) → STM32主控制器 → (PWM & 方向控制信号) → 电机驱动模块 → (驱动电流) → 直流电机
执行层 - 小车的“双腿”
小车的“双腿”是两个由直流电机驱动的轮子。其运动控制依赖两个核心技术:
- 差速转向:这是移动机器人最基础的运动原理。通过精确控制左右两个驱动轮的转速差异,可以实现丰富的姿态控制。
- 直行:左轮转速 = 右轮转速
- 右转:左轮转速 > 右轮转速
- 左转:左轮转速 < 右轮转速
- 原地旋转:左右轮以相同速度反向转动
- PWM调速:直流电机的转速与施加给它的平均电压成正比。脉冲宽度调制(PWM)是一种通过高速开关数字信号,来模拟连续变化的模拟电压的技术。通过改变PWM信号的“占空比”(高电平在一个周期内所占的比例),我们就能非常精确地控制电机的平均电压,从而实现平滑的调速。这为PID算法输出的连续控制量提供了物理执行的可能。
硬件平台搭建:从选型到连接
一个稳固可靠的硬件平台是项目成功的一半。本节将提供一份经过验证的硬件方案,并解释每个选择背后的考量。
元器件清单 (BOM)
以下是构建本循迹小车所需的核心组件清单:
硬件连接与电路设计
正确的硬件连接是系统正常工作的前提。下图展示了一个典型的连接方案,请严格按照图示和说明进行接线。
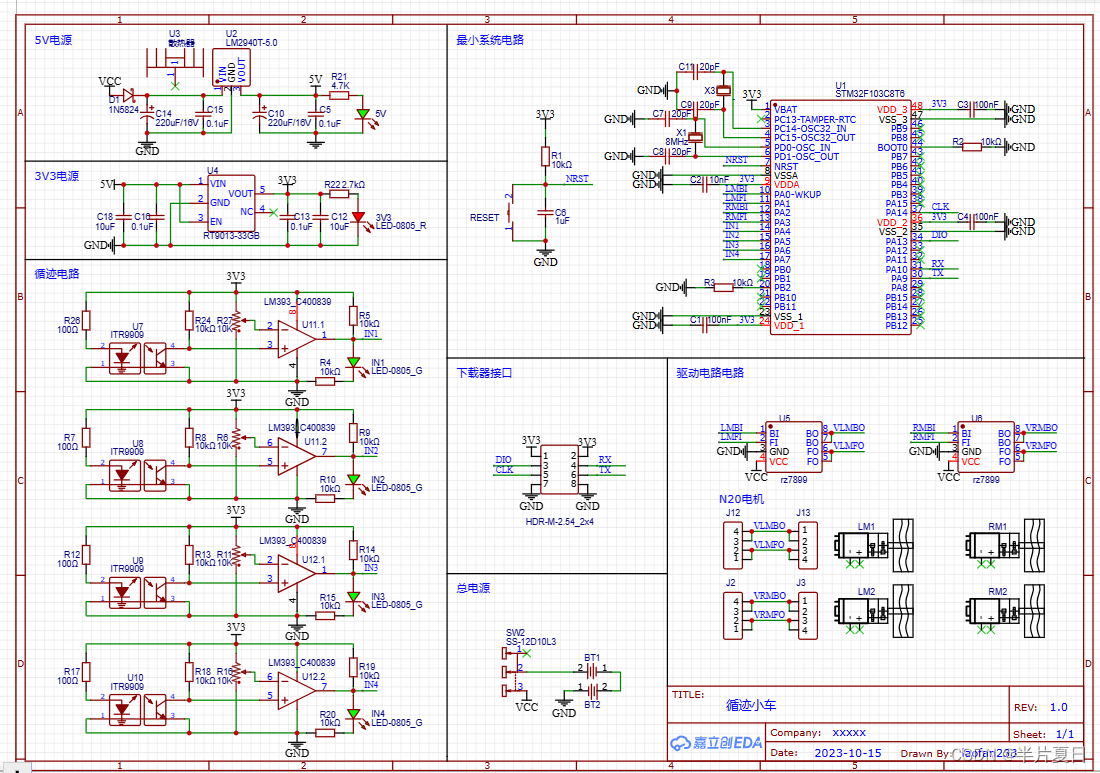
STM32、L298N与循迹模块的连接示意图 (来源: CSDN博客)
详细连接说明:
- 电源连接:
- 锂电池组的正极(+)接到L298N的
12V输入端。 - 锂电池组的负极(-)接到L298N的
GND,并与STM32核心板的GND相连(关键:必须共地!)。 - L298N上的
5V输出可以为循迹模块供电,但不建议为STM32供电,最好通过USB或独立的5V稳压模块为STM32供电,避免电机噪声干扰。
- 锂电池组的正极(+)接到L298N的
- 循迹模块连接:
- 循迹模块的
VCC和GND接到L298N的5V和GND。 - 五路传感器的信号输出引脚(如
D1-D5)分别连接到STM32的五个GPIO输入口(例如PA0-PA4)。
- 循迹模块的
- 电机驱动连接:
- L298N的
OUT1,OUT2连接左电机;OUT3,OUT4连接右电机。 - L298N的
ENA和ENB引脚(使能端,用于PWM调速)分别连接到STM32的两个支持PWM输出的定时器引脚(如PB0,PB1)。 - L298N的
IN1,IN2(控制左电机方向)和IN3,IN4(控制右电机方向)分别连接到STM32的四个普通GPIO输出口(如PB12-PB15)。
- L298N的
安全提示: 在连接电源之前,请反复检查接线是否正确,特别是正负极,以防烧毁元器件。确保所有模块共地是电路正常工作的基本前提。
软件算法设计:从“能跑”到“跑好”的进阶之路
软件是赋予小车灵魂的关键。本节将是全文的核心,我们将从最基础的循迹逻辑开始,逐步升级到稳定、高效的PID控制算法,并提供关键的STM32代码实现。
开发环境配置
我们推荐使用业界标准的 Keil MDK 作为IDE,并配合 STM32CubeMX 图形化配置工具。STM32CubeMX可以极大地简化初始化代码的编写,你只需在图形界面上点击配置GPIO为输入/输出,配置定时器为PWM模式,它就能自动生成对应的初始化C代码框架。
第一阶段:基础“IF-ELSE”循迹
这是最直观的循迹方法,其核心思想是根据传感器不同的组合状态,直接设定左右轮的固定动作。
思路讲解
假设五路传感器从左到右为S1-S5,检测到黑线为1,白色为0。我们可以定义如下规则:
xx1xx(中间传感器在黑线上): 直行 (左右轮速度相同)。x11xx(中间和左二在黑线上): 小左转 (右轮速度 > 左轮速度)。11xxx(最左两个在黑线上): 大左转 (右轮高速,左轮低速或反转)。xx11x(中间和右二在黑线上): 小右转 (左轮速度 > 右轮速度)。xxx11(最右两个在黑线上): 大右转 (左轮高速,右轮低速或反转)。00000(全部脱线): 保持上次状态或停车。
代码示例
// 伪代码示例void track_basic() { // 读取5个传感器的值,存入S[0]到S[4] read_sensors(S); if (S[2] == 1) { // 正中 go_forward(); } else if (S[1] == 1) { // 偏左 turn_right_small(); } else if (S[3] == 1) { // 偏右 turn_left_small(); } else if (S[0] == 1) { // 严重偏左 turn_right_sharp(); } else if (S[4] == 1) { // 严重偏右 turn_left_sharp(); } else { stop(); }} 局限性分析
这种方法虽然简单,但缺点非常明显:
- 动作生硬:小车的调整是阶跃式的,不是前进就是固定角度的转弯,导致行进路线呈“Z”字形,非常摇晃。
- 速度受限:由于调整不平滑,速度稍快就容易冲出赛道。
- 适应性差:对不同曲率的弯道适应性很差,无法做到平滑过弯。
为了克服这些缺点,我们需要一种更“聪明”的控制策略,能够根据偏离程度进行线性、平滑的调整。这正是PID算法的用武之地。
第二阶段:核心进阶 - PID控制算法深度解析
PID(Proportional-Integral-Derivative)是工业控制中最经典、应用最广泛的反馈控制器。它的本质,就是一种基于“过去、现在、未来”的综合误差校正策略。
生动的比喻: 想象你在驾驶汽车,目标是保持在车道正中。
- P (比例): 你看到车偏离了中央,偏离得越多,你打方向盘的角度就越大。这是对“现在”误差的直接反应。
- D (微分): 你不仅看车的位置,还看车偏离的速度。如果车正快速地偏向一侧,即使当前位置偏差不大,你也会提前向反方向回正方向盘,以防止冲出车道。这是对“未来”趋势的预判和抑制。
- I (积分): 如果因为路面倾斜或轮胎问题,车总是会不自觉地向一侧跑偏,你会在心中记住这个“累积的偏差”,并在打方向时始终带一点修正量,以抵消这个系统性的误差。这是对“过去”累积误差的补偿。
1. 误差(Error)的量化
PID控制的第一步,是将传感器的离散状态,转化为一个连续的、带符号的误差值(Error)。一个常用的加权平均法如下:
为五个传感器赋予权重,例如 {-2, -1, 0, 1, 2}。当传感器检测到黑线时,其值为1,否则为0。误差值 = (S1*(-2) + S2*(-1) + S3*0 + S4*1 + S5*2) / (S1+S2+S3+S4+S5)。
- 居中 (00100): Error = (1*0)/1 = 0
- 偏右 (00010): Error = (1*1)/1 = 1
- 严重偏左 (10000): Error = (1*(-2))/1 = -2
- 介于中和右之间 (00110): Error = (1*0 + 1*1)/(1+1) = 0.5
通过这种方式,我们得到了一个能够精确反映小车偏离中心线程度和方向的连续变量 Error。
2. PID三项解析
PID的最终输出是一个控制量(例如,速度修正值),它由P、I、D三项相加而成:ControlOutput = P_out + I_out + D_out。
- P (Proportional) - 比例项:
P_out = Kp * Error。它构成了控制的主要部分。Kp是比例系数,决定了对当前误差的反应“灵敏度”。Kp越大,修正越快,但过大会导致在目标值两侧剧烈振荡。 - I (Integral) - 积分项:
I_out = Ki * Σ(Error)。它负责消除“静差”,即系统稳定后仍然存在的微小误差。例如,如果小车左右轮摩擦力不一致,仅靠P控制可能最终会稳定在偏离中心线一点点的位置。积分项会累积这个小误差,直到产生足够的输出来彻底消除它。Ki是积分系数。 - D (Derivative) - 微分项:
D_out = Kd * (Error - LastError)。它反映了误差的变化率,即“趋势”。当小车快速冲向中心线时(Error迅速减小),微分项会产生一个反向的作用力,起到“刹车”和“阻尼”的效果,从而抑制超调和振荡,让系统响应更平滑、更稳定。Kd是微分系数。
图表:不同控制算法下小车位置误差随时间的变化。PID控制能最快、最平稳地消除误差。
PID算法代码实现 (STM32)
在STM32上实现PID算法,通常分为定义PID结构体、编写PID计算函数和在主循环中调用三步。
1. PID结构体定义
将PID相关的所有变量封装在一个结构体中,便于管理和复用。
typedef struct { float Kp; float Ki; float Kd; float Error; float LastError; float Integral; float SetPoint; // 目标值,对于循迹,通常是0 float Output; // PID计算输出} PID_TypeDef; 2. PID计算函数
这是PID算法的核心,输入当前测量值,返回计算出的控制量。
void PID_Calc(PID_TypeDef *pid, float CurrentValue) { // 1. 计算当前误差 pid->Error = pid->SetPoint - CurrentValue; // 2. 计算积分项 (带积分限幅,防止积分饱和) pid->Integral += pid->Error; if (pid->Integral > 3000) pid->Integral = 3000; if (pid->Integral Integral = -3000; // 3. 计算微分项 float derivative = pid->Error - pid->LastError; // 4. 计算总输出 pid->Output = (pid->Kp * pid->Error) + (pid->Ki * pid->Integral) + (pid->Kd * derivative); // 5. 更新上次误差 pid->LastError = pid->Error;} 3. 主循环调用
在主循环中,不断地执行“感知-决策-执行”的闭环。
PID_TypeDef pid_controller;// 在初始化代码中设置Kp, Ki, Kd...pid_controller.Kp = 0.8;pid_controller.Ki = 0.01;pid_controller.Kd = 0.3;pid_controller.SetPoint = 0;int main(void) { // ...系统初始化... while (1) { // 1. 读取传感器,计算加权平均误差值 float current_error = calculate_weighted_error(); // 2. 调用PID计算函数 PID_Calc(&pid_controller, current_error); // 3. 根据PID输出调整电机速度 int base_speed = 100; // 基础速度 int left_speed = base_speed + pid_controller.Output; int right_speed = base_speed - pid_controller.Output; // 4. 设置左右轮PWM占空比 (带限速保护) set_motor_pwm(left_speed, right_speed); // 延时一小段时间,确定控制周期 delay_ms(10); }} 调试与优化:让你的小车跑得更快更稳
写完代码只是第一步,真正的挑战在于调试和参数整定,这个过程将极大地加深你对控制理论的理解。
PID参数整定(调参)的艺术
PID调参没有一成不变的公式,更多的是一种经验和感觉的结合。以下是一套行之有效的步骤,即“Ziegler-Nichols”方法的简化版:
- 归零法:首先将
Ki和Kd设为0。 - 先调P:从小到大逐渐增加
Kp。你会观察到:Kp太小:小车反应迟钝,转弯半径大,甚至无法循线。Kp适中:小车能够循线,但在直线上会来回小幅摆动。Kp太大:小车在黑线两侧剧烈振荡,无法稳定。
目标:找到一个使小车产生稳定、等幅振荡的
Kp值,记下此值,然后取其一半(例如0.5-0.6倍)作为最终的Kp。 - 再调D:保持
Kp不变,从小到大增加Kd。你会发现,随着Kd的增加,小车的振荡被明显抑制,动作变得平滑,过弯更加“老练”。Kd的作用就像减震器。但Kd过大会使系统对噪声过于敏感,可能导致小车抖动。 - 最后调I:通常,对于循迹小车,如果赛道和车体比较理想,
Kp和Kd已经能获得不错的效果。只有当小车在直线上稳定后,仍然持续偏向一侧时,才需要从小到大加入Ki来消除这个静差。注意,Ki过大会导致积分饱和,使系统响应变慢,甚至产生大的超调。
调试利器: 使用串口将
Error、P_out、I_out、D_out和最终的Output值实时打印到电脑上。通过观察这些数据的变化,你可以将抽象的控制过程可视化,极大地帮助你理解参数的作用并进行调整。
常见问题(FAQ)与解决方案
- 问题1:小车上电后完全不动或只在一个轮子转圈。
- 排查:首先检查硬件。电机线是否接反?L298N的供电是否正常?STM32与L298N的控制线是否连接正确?程序中控制方向的GPIO逻辑是否写反?
- 问题2:小车无法识别黑线,传感器状态一直不变。
- 排查:检查传感器灵敏度。大多数循迹模块上有个蓝色的小电位器,用螺丝刀旋转它可以调节探测距离和灵敏度。同时检查传感器的安装高度是否合适(通常为3-5mm)。最后,排除强烈的环境光干扰(如太阳直射)。
- 问题3:直道抖动严重,弯道直接飞出赛道。
- 排查:这是最典型的PID参数不佳的表现。通常是
Kp过大,或者Kd不足。请耐心按照上述调参步骤重新整定。可以先降低基础速度,调好参数后再逐步提速。
- 排查:这是最典型的PID参数不佳的表现。通常是
性能优化与功能拓展
当你的小车已经能稳定循迹后,可以挑战以下进阶方向:
- 速度闭环控制:为电机安装编码器,可以精确测量电机的实际转速。这样就可以构成“速度环+方向环”的双闭环控制系统。外环(方向环)的PID负责计算目标转速差,内环(速度环)的PID负责让两个电机精确达到各自的目标转速。这将使小车在不同负载(如上坡)下也能保持稳定速度。
- 特殊元素处理:在标准的智能车竞赛中,会有十字路口、断线、直角弯等特殊元素。这需要你设计更复杂的逻辑,例如通过定时器记录丢线时间来判断是断线还是终点,或通过检测到全白/全黑来识别十字路口并执行预设路径。
- 功能拓展:循迹小车是一个绝佳的平台。你可以为其增加超声波模块实现避障,增加蓝牙/WiFi模块实现手机APP遥控,甚至升级为摄像头,使用OpenMV或树莓派进行视觉巡线,进入机器视觉的精彩世界。
总结与资源分享
恭喜你,坚持读到这里!通过本文的引导,你已经系统地学习了构建一辆高性能智能循迹小车的全过程。我们从最基础的“感知-决策-执行”模型出发,搭建了以STM32为核心的硬件平台,并深入剖析了从简单的逻辑判断到复杂的PID控制算法的软件实现。更重要的是,你掌握了调试和优化的实战方法。
完成这个项目,你收获的绝不仅仅是一个会跑的小车。你获得的是一次完整的嵌入式系统开发体验,是对传感器技术、电机控制、闭环反馈理论和嵌入式编程的一次深度融合与实践。这份经验,将为你后续学习更复杂的机器人和自动化系统打下坚实的基础。
项目源码与资料分享:
为了方便大家学习和实践,我已将本项目的完整STM32工程源码、电路原理图(Fritzing格式)以及详细的元器件清单(BOM)整理并上传。
请访问以下链接获取:
[GitHub/Gitee] STM32智能循迹小车项目仓库 (注:此为示例链接)
动手实践是检验真理的唯一标准。希望你即刻启程,在敲代码、拧螺丝、调参数的过程中,享受创造的乐趣。如果在实践中遇到任何问题,欢迎在评论区留言交流,

