学习卡尔曼滤波(Kalman Filter)并在Stm32上验证_stm32 卡尔曼滤波
卡尔曼滤波(Kalman Filter)是一种强大的信号处理工具,广泛应用于噪声过滤和状态估计。本文将介绍卡尔曼滤波的使用场景和方法,并通过STM32F103的ADC采样实现,分别讲解一维、二维和三维卡尔曼滤波的代码和效果。
一、卡尔曼滤波的使用场景
卡尔曼滤波适用于从带噪声的测量数据中估计系统状态,特别适合以下场景:
1. 传感器数据平滑:
• 如ADC采集的电压、温度,或IMU的加速度、角速度,滤除噪声后得到更稳定的信号。
2. 状态估计:
• 机器人导航中,融合GPS和IMU数据估计位置和速度。
• 自动驾驶中,跟踪车辆的运动轨迹。
3. 预测与控制:
• 电池管理系统(BMS)中,估计SOC(荷电状态)和SOH(健康状态)。
• 工业控制中,实时校正传感器偏差。
在嵌入式系统中,卡尔曼滤波因计算效率高、递归性强,非常适合单片机实现。
二、卡尔曼滤波的使用方法
卡尔曼滤波的核心是预测和更新两个步骤,基于线性系统和高斯噪声假设。以下是通用流程:
1. 系统建模:
• 定义状态向量(如位置、速度)。
• 建立状态转移模型(描述状态如何随时间变化)。
• 定义测量模型(传感器如何观测状态)。
2. 初始化:
• 设置初始状态估计、估计协方差、过程噪声协方差(Q)、测量噪声协方差(R)。
3. 预测:
• 根据状态转移方程预测下一时刻状态。
• 更新估计协方差。
4. 更新:
• 计算卡尔曼增益(权衡预测和测量)。
• 结合实际测量值修正状态估计。
• 更新协方差。
数学公式(以一维为例):
• 预测:
• 更新:
其中:
• : 状态估计
• P: 估计协方差
• Q: 过程噪声协方差
• R: 测量噪声协方差
• K: 卡尔曼增益
• : 测量值
再详细点就是
1. 状态预测:
• 状态估计: (假设状态不随时间变化,或有简单的动态模型)。
• 协方差预测:,其中 ( Q ) 是过程噪声协方差。
2. 测量更新:
• 卡尔曼增益: ,其中 ( R ) 是测量噪声协方差。
• 状态更新: ,其中 ( z_k ) 是ADC测量值。
• 协方差更新: 。
关键参数:
• :估计值(滤波后的ADC值)。
• P:估计误差协方差,反映估计的不确定性。
• Q:过程噪声(系统本身的随机变化,通常较小)。
• R:测量噪声(噪声,需根据实际测量估计)。
三、STM32F103 ADC采样实践
我们以STM32F103(Cortex-M3,带12位ADC)为例,通过ADC采集模拟电压信号,分别实现一维、二维和三维卡尔曼滤波。硬件假设:
• 使用PA0(ADC1通道0)采集0-3.3V电压。
• 目标:滤除ADC噪声,得到平滑信号。
3.1 ADC 配置
使用STM32CubeMX配置ADC在这里就不多说了,读取adc转换的值为如下代码。当然也可以直接对adc_value进行滤波。代码基于HAL库:
float Read_ADC(void) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, HAL_MAX_DELAY); uint16_t adc_value = HAL_ADC_GetValue(&hadc1); return (float)adc_value * 3.3f / 4095.0f; // 转换为电压}3.2 一维卡尔曼滤波
直接平滑ADC采集的电压值,假设电压变化缓慢(无明显动态)。
模型
• 状态:电压值 。
• 状态转移: (静态系统)。
• 测量: ,其中
是ADC噪声。
代码如下:
typedef struct { float x; // 状态估计(电压) float P; // 估计协方差 float Q; // 过程噪声协方差 float R; // 测量噪声协方差} Kalman1D;void Kalman1D_Init(Kalman1D *kf, float initial_x, float initial_P, float Q, float R) { kf->x = initial_x; kf->P = initial_P; kf->Q = Q; kf->R = R;}float Kalman1D_Update(Kalman1D *kf, float measurement) { // 预测 kf->P = kf->P + kf->Q; // 更新 float K = kf->P / (kf->P + kf->R); kf->x = kf->x + K * (measurement - kf->x); kf->P = (1 - K) * kf->P; return kf->x;}Kalman1D kf;int main(void) { HAL_Init(); /*中间初始化代码*/ Kalman1D_Init(&kf, 0.0f, 1.0f, 0.001f, 0.1f); // Q=0.001, R=0.1 while (1) { float voltage = Read_ADC(); float filtered_voltage = Kalman1D_Update(&kf, voltage); printf(\"Raw: %.3f V, Filtered: %.3f V\\n\", voltage, filtered_voltage); HAL_Delay(10); }}参数说明
• R:通过采集静止信号,计算ADC电压方差(比如0.1)。
• Q:设为小值(如0.001),因为电压变化慢。
• 效果:假设输入1.5V带噪声信号(1.4-1.6V抖动),滤波后稳定在1.5V左右。
3.3 二维卡尔曼滤波
假设电压有缓慢变化趋势(如传感器漂移),我们跟踪电压和其变化率(类似速度)。
模型
• 状态: ,其中
是电压,
是电压变化率。
• 状态转移: 其中
是采样间隔(如0.01s)。
• 测量: (仅测量电压)。
代码实现:
#include // 使用ARM CMSIS库进行矩阵运算typedef struct { float x[2]; // 状态 [电压, 变化率] float P[2][2]; // 协方差矩阵 float Q[2][2]; // 过程噪声协方差 float R; // 测量噪声协方差 float dt; // 采样间隔} Kalman2D;void Kalman2D_Init(Kalman2D *kf, float initial_x, float initial_dx, float dt) { kf->x[0] = initial_x; kf->x[1] = initial_dx; kf->P[0][0] = 1.0f; kf->P[0][1] = 0.0f; kf->P[1][0] = 0.0f; kf->P[1][1] = 1.0f; kf->Q[0][0] = 0.001f; kf->Q[0][1] = 0.0f; kf->Q[1][0] = 0.0f; kf->Q[1][1] = 0.001f; kf->R = 0.1f; kf->dt = dt;}float Kalman2D_Update(Kalman2D *kf, float measurement) { // 状态转移矩阵 float A[2][2] = {{1, kf->dt}, {0, 1}}; float H[2] = {1, 0}; // 测量矩阵 // 预测 float x_pred[2]; x_pred[0] = A[0][0] * kf->x[0] + A[0][1] * kf->x[1]; x_pred[1] = A[1][0] * kf->x[0] + A[1][1] * kf->x[1]; float P_pred[2][2]; P_pred[0][0] = A[0][0] * (kf->P[0][0] * A[0][0] + kf->P[0][1] * A[1][0]) + A[0][1] * (kf->P[1][0] * A[0][0] + kf->P[1][1] * A[1][0]) + kf->Q[0][0]; // 类似计算其他元素... // 更新 float innovation = measurement - (H[0] * x_pred[0] + H[1] * x_pred[1]); float S = H[0] * (P_pred[0][0] * H[0] + P_pred[0][1] * H[1]) + H[1] * (P_pred[1][0] * H[0] + P_pred[1][1] * H[1]) + kf->R; float K[2]; K[0] = (P_pred[0][0] * H[0] + P_pred[0][1] * H[1]) / S; K[1] = (P_pred[1][0] * H[0] + P_pred[1][1] * H[1]) / S; kf->x[0] = x_pred[0] + K[0] * innovation; kf->x[1] = x_pred[1] + K[1] * innovation; // 更新协方差(简化) kf->P[0][0] = (1 - K[0] * H[0]) * P_pred[0][0]; // 类似更新其他元素... return kf->x[0];}/************** 主程序*************/Kalman2D kf;int main(void) { HAL_Init(); ADC_Init(); Kalman2D_Init(&kf, 0.0f, 0.0f, 0.01f); while (1) { float voltage = Read_ADC(); float filtered_voltage = Kalman2D_Update(&kf, voltage); printf(\"Raw: %.3f V, Filtered: %.3f V\\n\", voltage, filtered_voltage); HAL_Delay(10); }}参数与效果
• R, Q:类似一维,Q可稍大(如0.01)以适应变化率。
• 效果:能跟踪缓慢变化的电压(如线性漂移),比一维更平滑
3.4 三维卡尔曼滤波
假设电压有更复杂的动态(如加速度模型),跟踪电压、变化率和加速度。
模型
• 状态: 。表示电压,变化率,加速度。
• 状态转移:
是过程噪声,协方差矩阵为
。
• 测量: 。
因为ADC只是测量电压,是测量噪声,协方差为
噪声参数说明:
:过程噪声协方差,设为对角矩阵,反映状态变化的不确定性。
:测量噪声协方差,通过实验估计ADC噪声
代码实现:
共有两种一种不使用CMSIS-DSP库,简单的矩阵运算另一种使用CMSIS-DSP库
不使用CMSIS-DSP库:
#include \"stm32f1xx_hal.h\"#include // 三维卡尔曼滤波器结构体typedef struct { float x[3]; // 状态向量 [电压, 变化率, 加速度] float P[3][3]; // 估计协方差矩阵 float Q[3][3]; // 过程噪声协方差矩阵 float R; // 测量噪声协方差 float dt; // 采样间隔(秒)} Kalman3D;// 初始化三维卡尔曼滤波器void Kalman3D_Init(Kalman3D *kf, float initial_x, float initial_dx, float initial_ddx, float dt) { // 初始状态 kf->x[0] = initial_x; // 初始电压 kf->x[1] = initial_dx; // 初始变化率 kf->x[2] = initial_ddx; // 初始加速度 // 初始协方差矩阵(单位矩阵,表示初始不确定性) for (int i = 0; i < 3; i++) { for (int j = 0; j P[i][j] = (i == j) ? 1.0f : 0.0f; } } // 过程噪声协方差(对角矩阵,假设各状态独立) for (int i = 0; i < 3; i++) { for (int j = 0; j Q[i][j] = (i == j) ? 0.001f : 0.0f; } } // 测量噪声协方差(通过实验估计) kf->R = 0.1f; // 采样间隔 kf->dt = dt;}// 三维卡尔曼滤波更新float Kalman3D_Update(Kalman3D *kf, float measurement) { // 状态转移矩阵 A float A[3][3] = { {1.0f, kf->dt, 0.5f * kf->dt * kf->dt}, {0.0f, 1.0f, kf->dt}, {0.0f, 0.0f, 1.0f} }; // 测量矩阵 H float H[3] = {1.0f, 0.0f, 0.0f}; // 临时变量 float x_pred[3]; // 预测状态 float P_pred[3][3]; // 预测协方差 float K[3]; // 卡尔曼增益 // 1. 预测步骤 // 状态预测:x_pred = A * x for (int i = 0; i < 3; i++) { x_pred[i] = 0.0f; for (int j = 0; j x[j]; } } // 协方差预测:P_pred = A * P * A^T + Q float temp[3][3] = {0}; // temp = A * P for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { for (int k = 0; k P[k][j]; } } } // P_pred = temp * A^T + Q for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { P_pred[i][j] = 0.0f; for (int k = 0; k Q[i][j]; } } // 2. 更新步骤 // 创新(测量残差):y = z - H * x_pred float y = measurement - (H[0] * x_pred[0] + H[1] * x_pred[1] + H[2] * x_pred[2]); // 创新协方差:S = H * P_pred * H^T + R float S = 0.0f; float temp_H[3] = {0}; // temp_H = P_pred * H^T for (int i = 0; i < 3; i++) { for (int j = 0; j R; // 卡尔曼增益:K = P_pred * H^T / S for (int i = 0; i < 3; i++) { K[i] = temp_H[i] / S; } // 状态更新:x = x_pred + K * y for (int i = 0; i x[i] = x_pred[i] + K[i] * y; } // 协方差更新:P = (I - K * H) * P_pred float I_KH[3][3] = {0}; for (int i = 0; i < 3; i++) { for (int j = 0; j < 3; j++) { I_KH[i][j] = (i == j ? 1.0f : 0.0f) - K[i] * H[j]; } } // P = I_KH * P_pred for (int i = 0; i < 3; i++) { for (int j = 0; j P[i][j] = 0.0f; for (int k = 0; k P[i][j] += I_KH[i][k] * P_pred[k][j]; } } } return kf->x[0]; // 返回滤波后的电压}// 主程序Kalman3D kf;int main(void) { HAL_Init(); ADC_Init(); // 初始化三维卡尔曼滤波器 Kalman3D_Init(&kf, 0.0f, 0.0f, 0.0f, 0.01f); // 初始电压=0, dt=0.01s while (1) { // 读取 ADC float voltage = Read_ADC(); // 卡尔曼滤波 float filtered_voltage = Kalman3D_Update(&kf, voltage); // 输出结果(通过串口) printf(\"Raw: %.3f V, Filtered: %.3f V\\n\", voltage, filtered_voltage); HAL_Delay(10); // 每10ms采样一次 }}带CMSIS-DSP
使用arm的CMSIS_DSP库,适用于高频或多维使用
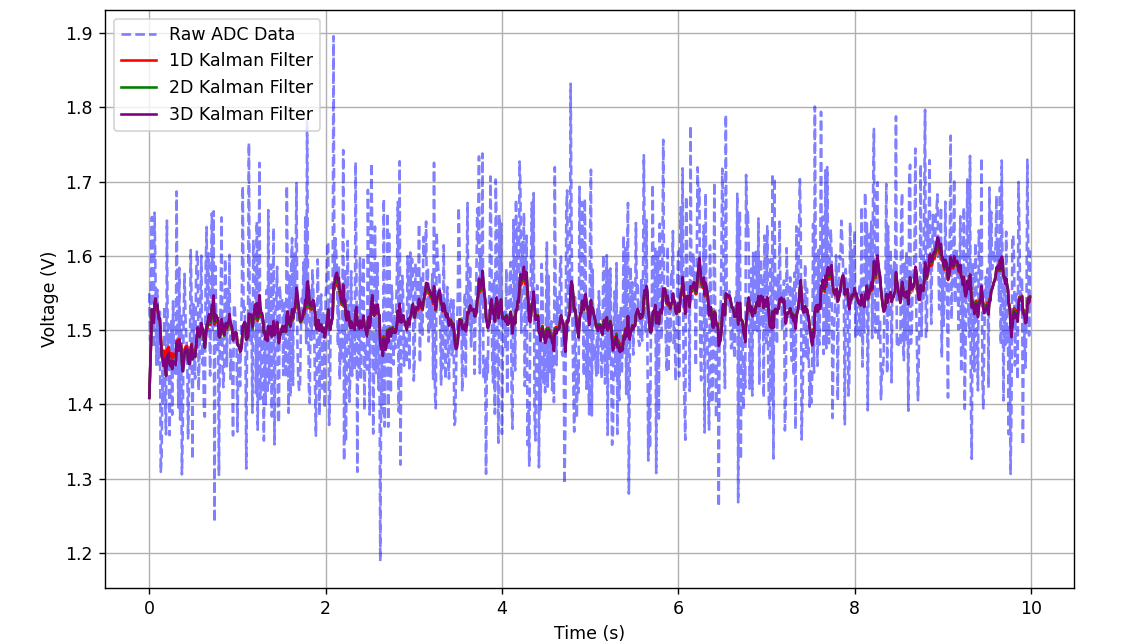
#include \"stm32f1xx_hal.h\"#include \"arm_math.h\"#include // ADC 句柄(需在 STM32CubeMX 中配置)extern ADC_HandleTypeDef hadc1;// 三维卡尔曼滤波器结构体typedef struct { arm_matrix_instance_f32 x; // 状态向量 [电压, 变化率, 加速度] (3x1) arm_matrix_instance_f32 P; // 估计协方差矩阵 (3x3) arm_matrix_instance_f32 Q; // 过程噪声协方差矩阵 (3x3) float R; // 测量噪声协方差 float dt; // 采样间隔(秒) // 辅助矩阵(预分配,避免动态分配) arm_matrix_instance_f32 A; // 状态转移矩阵 (3x3) arm_matrix_instance_f32 H; // 测量矩阵 (1x3) arm_matrix_instance_f32 x_pred; // 预测状态 (3x1) arm_matrix_instance_f32 P_pred; // 预测协方差 (3x3) arm_matrix_instance_f32 K; // 卡尔曼增益 (3x1)} Kalman3D;// 矩阵数据存储float x_data[3]; // 状态向量float P_data[9]; // 协方差矩阵 (3x3)float Q_data[9]; // 过程噪声协方差float A_data[9]; // 状态转移矩阵float H_data[3]; // 测量矩阵float x_pred_data[3]; // 预测状态float P_pred_data[9]; // 预测协方差float K_data[3]; // 卡尔曼增益// 初始化三维卡尔曼滤波器void Kalman3D_Init(Kalman3D *kf, float initial_x, float initial_dx, float initial_ddx, float dt) { // 初始化状态向量 x x_data[0] = initial_x; x_data[1] = initial_dx; x_data[2] = initial_ddx; arm_mat_init_f32(&kf->x, 3, 1, x_data); // 初始化协方差矩阵 P (单位矩阵) for (int i = 0; i P, 3, 3, P_data); // 初始化过程噪声协方差 Q (对角矩阵) for (int i = 0; i Q, 3, 3, Q_data); // 初始化状态转移矩阵 A A_data[0] = 1.0f; A_data[1] = dt; A_data[2] = 0.5f * dt * dt; A_data[3] = 0.0f; A_data[4] = 1.0f; A_data[5] = dt; A_data[6] = 0.0f; A_data[7] = 0.0f; A_data[8] = 1.0f; arm_mat_init_f32(&kf->A, 3, 3, A_data); // 初始化测量矩阵 H H_data[0] = 1.0f; H_data[1] = 0.0f; H_data[2] = 0.0f; arm_mat_init_f32(&kf->H, 1, 3, H_data); // 初始化预测状态和协方差 arm_mat_init_f32(&kf->x_pred, 3, 1, x_pred_data); arm_mat_init_f32(&kf->P_pred, 3, 3, P_pred_data); // 初始化卡尔曼增益 arm_mat_init_f32(&kf->K, 3, 1, K_data); // 测量噪声协方差 kf->R = 0.1f; // 采样间隔 kf->dt = dt;}// 三维卡尔曼滤波更新float Kalman3D_Update(Kalman3D *kf, float measurement) { // 临时矩阵 float temp1_data[9]; // 3x3 float temp2_data[3]; // 3x1 float temp3_data[1]; // 1x1 arm_matrix_instance_f32 temp1, temp2, temp3; arm_mat_init_f32(&temp1, 3, 3, temp1_data); arm_mat_init_f32(&temp2, 3, 1, temp2_data); arm_mat_init_f32(&temp3, 1, 1, temp3_data); // 1. 预测步骤 // 状态预测:x_pred = A * x arm_mat_mult_f32(&kf->A, &kf->x, &kf->x_pred); // 协方差预测:P_pred = A * P * A^T + Q arm_mat_mult_f32(&kf->A, &kf->P, &temp1); // temp1 = A * P arm_mat_trans_f32(&kf->A, &temp1); // temp1 = A^T (复用 temp1) arm_mat_mult_f32(&temp1, &kf->A, &kf->P_pred); // P_pred = (A * P) * A^T arm_mat_add_f32(&kf->P_pred, &kf->Q, &kf->P_pred); // P_pred += Q // 2. 更新步骤 // 创新:y = z - H * x_pred arm_mat_mult_f32(&kf->H, &kf->x_pred, &temp3); // temp3 = H * x_pred float y = measurement - temp3_data[0]; // 创新协方差:S = H * P_pred * H^T + R arm_mat_mult_f32(&kf->H, &kf->P_pred, &temp2); // temp2 = H * P_pred arm_mat_trans_f32(&kf->H, &temp1); // temp1 = H^T arm_mat_mult_f32(&temp2, &temp1, &temp3); // temp3 = (H * P_pred) * H^T float S = temp3_data[0] + kf->R; // 卡尔曼增益:K = P_pred * H^T / S arm_mat_trans_f32(&kf->H, &temp1); // temp1 = H^T arm_mat_mult_f32(&kf->P_pred, &temp1, &kf->K); // K = P_pred * H^T arm_mat_scale_f32(&kf->K, 1.0f / S, &kf->K); // K /= S // 状态更新:x = x_pred + K * y arm_mat_scale_f32(&kf->K, y, &temp2); // temp2 = K * y arm_mat_add_f32(&kf->x_pred, &temp2, &kf->x); // x = x_pred + K * y // 协方差更新:P = (I - K * H) * P_pred arm_mat_mult_f32(&kf->K, &kf->H, &temp1); // temp1 = K * H arm_mat_scale_f32(&temp1, -1.0f, &temp1); // temp1 = -K * H for (int i = 0; i P_pred, &kf->P); // P = (I - K * H) * P_pred return kf->x.pData[0]; // 返回滤波后的电压}// 主程序Kalman3D kf;int main(void) { HAL_Init(); ADC_Init(); // 初始化三维卡尔曼滤波器 Kalman3D_Init(&kf, 0.0f, 0.0f, 0.0f, 0.01f); // 初始电压=0, dt=0.01s while (1) { // 读取 ADC float voltage = Read_ADC(); // 卡尔曼滤波 float filtered_voltage = Kalman3D_Update(&kf, voltage); // 输出结果(通过串口) printf(\"Raw: %.3f V, Filtered: %.3f V\\n\", voltage, filtered_voltage); HAL_Delay(10); // 每10ms采样一次 }}python模拟效果,参数一样时:
四、总结与调试
参数调优:
• R:通过实验测量ADC噪声方差。
• Q:从小值开始,逐渐调整以平衡平滑度和响应速度。
通过一维到三维的实现,我们看到卡尔曼滤波的灵活性:
• 一维:简单高效,适合静态信号。
• 二维:能跟踪趋势,适合缓慢变化。
• 三维:适合复杂动态,需权衡计算成本。
希望这篇文章对你的嵌入式学习有帮助!未来可以尝试融合多传感器数据(如IMU+GPS),体验卡尔曼滤波的更多魅力。


